
前回 #07 では、歯車(ギア)を設計しました。モジュールと歯数の2つを決めるだけで、回転を伝えたり、速さと力を変えたりできる——歯車は「回転を伝える」部品でした。今回はもう一歩進んで、回転を「決まった動き」に変える部品——リンク機構(リンケージ)に挑戦します。
リンク機構と聞くと難しそうですが、正体は「棒(リンク)をピンでつないだだけ」の、とてもシンプルな仕組みです。身のまわりにもたくさんあります。電車のワイパー、ショベルカーのアーム、洗濯ばさみ、折りたたみ傘——どれも数本の棒をピンでつないで、ねらった動きを作り出しています。歯車が「回転を伝える」なら、リンクは「動きの形そのものを設計する」部品なのです。
今回はリンク機構の基本中の基本、四節(よんせつ)リンクをていねいに理解します。そして章末課題では、いよいよ第2部のゴール——前回作ったギアペアに爪をつないで、サーボモーターひとつで左右の爪がパクッと閉じるグリッパー(物をつかむ手)を完成させます。ロボットが初めて「物をつかむ」瞬間まで、あと少しです。
四節リンクの言葉を覚える——4本の棒と4つのジョイント
リンク機構のいちばん基本の形が四節リンクです。名前のとおり、4本のリンク(棒)を4つの回転ジョイント(ピン)で輪っか状につないだ機構です。まずはそれぞれの棒の名前を覚えましょう。
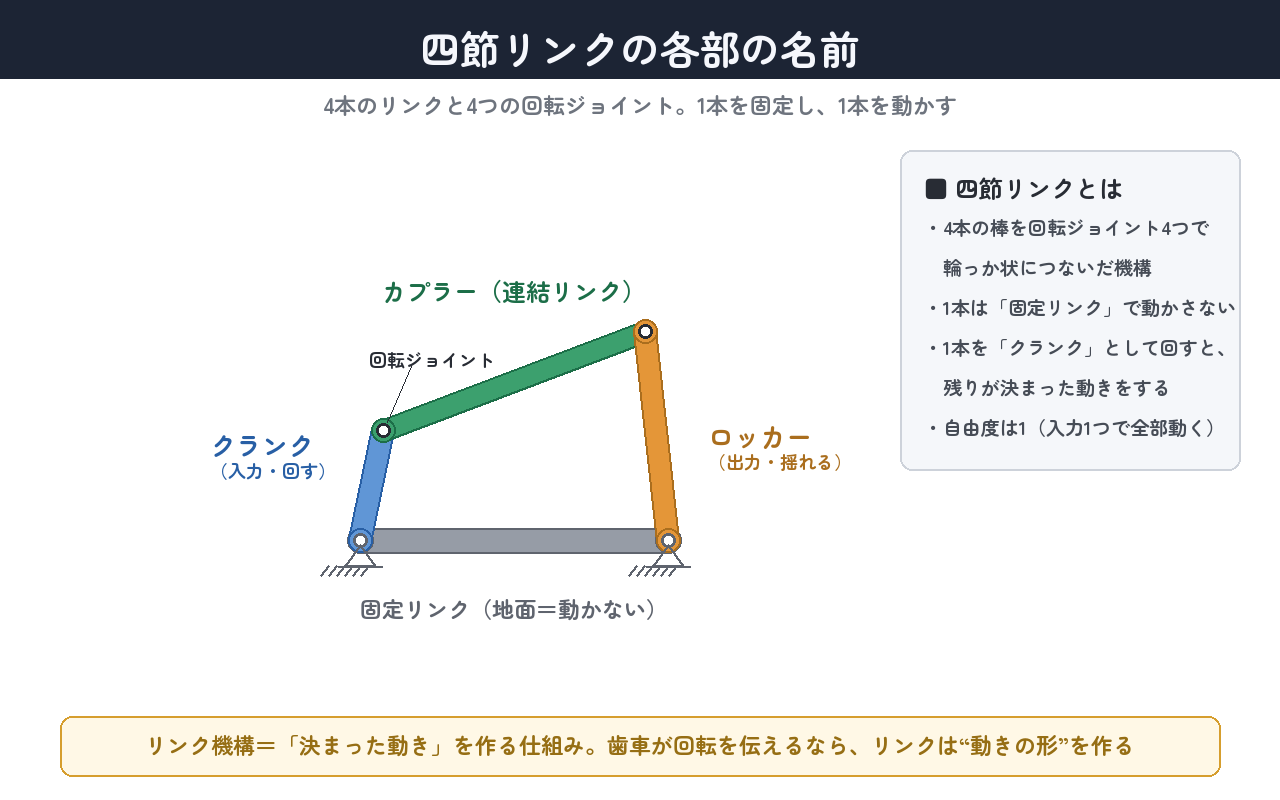
- 固定リンク(地面):動かさない、土台になる1本。フレームやベースに固定します。「リンクが4本」と言っても、1本は動かないので、実際に動くのは残り3本です。
- クランク:入力になる棒。ここをモーターやサーボで回します。
- カプラー(連結リンク):クランクとロッカーをつなぐ棒。実は、この棒の動きがいちばん面白く、あとで「平行移動」のカギになります。
- ロッカー:出力になる棒。クランクの動きを受けて、行ったり来たり(揺動)します。
四節リンクの大事な性質が「自由度は1」ということです。自由度1とは、入力をひとつ(クランクの角度)決めれば、残り全部の位置が自動的に決まるという意味です。だからモーター1個で、機構全体をきちんとコントロールできます。ロボットの関節がモーター1個で確実に動くのは、この「自由度1」のおかげです。
クランクは一回転できる?——グラスホフの条件
四節リンクを設計するとき、最初に確かめたいことがあります。それは「クランクはぐるりと一回転できるのか、それとも途中で引っかかって往復するだけなのか」という問題です。これは4本の棒の長さの組み合わせだけで決まり、グラスホフの条件という有名なルールで判定できます。
ルールはとてもシンプルです。4本のうちいちばん短い棒といちばん長い棒の長さを足します。それが残り2本の長さの合計以下なら、いちばん短い棒は一回転できます。
(最短)+(最長) が (残り2本の合計) 以下 → 最短リンクが一回転できる
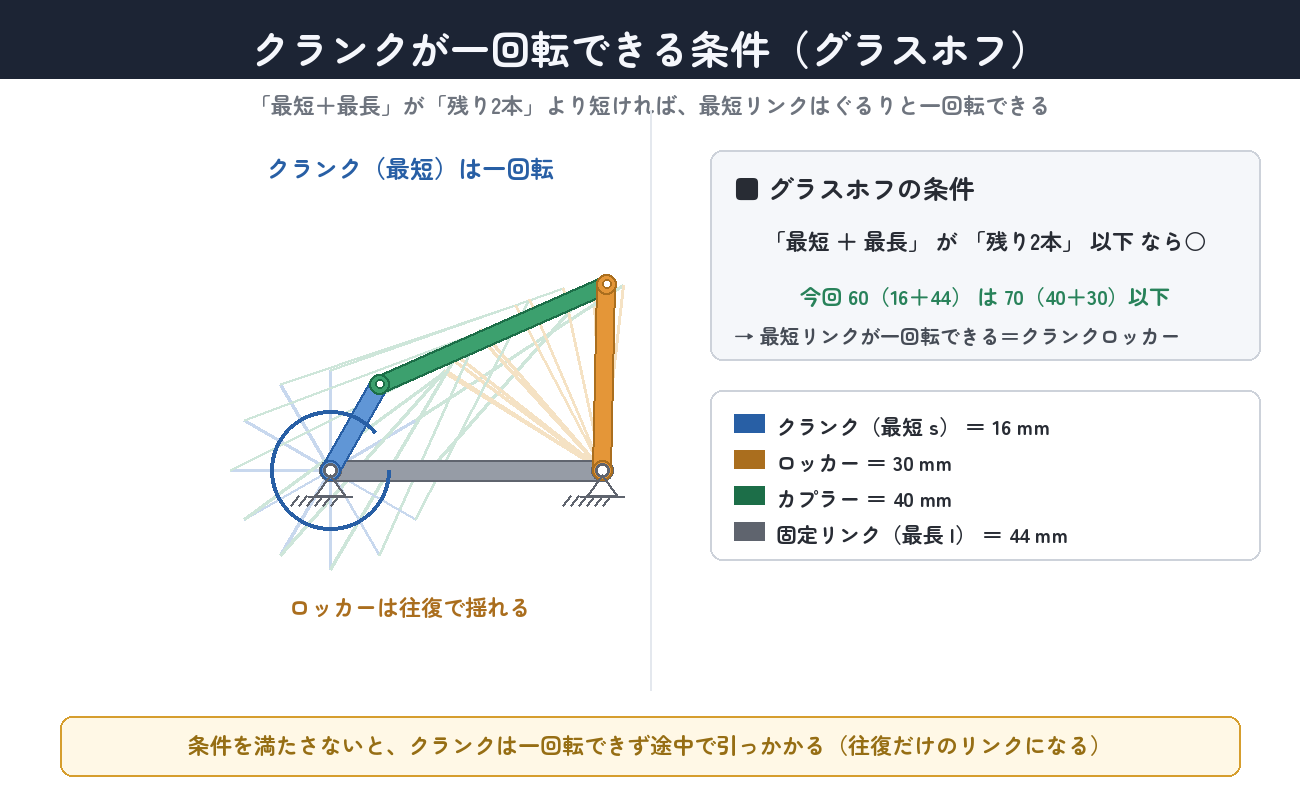
今回の本文の例(クランク16・カプラー40・ロッカー30・固定リンク44)で計算してみましょう。最短は16、最長は44なので、足すと16+44=60。残り2本は40と30で、合計40+30=70。60は70以下なので、条件を満たします。しかも一回転するのは最短リンク=クランクなので、この機構は「クランクロッカー」——クランクが一回転し、ロッカーが往復で揺れるタイプになります。
実際にFreeCADでクランクを1周ぶん動かしてロッカーの角度を測ると、ロッカーは83.5°から148.9°まで(揺動65.4°)のあいだを行ったり来たりしました。クランクをぐるぐる回すと、ロッカーがパタパタ揺れる——これがワイパーやミシンの動きの正体です。もし条件を満たさないと、クランクは一回転できず、途中で引っかかって往復だけのリンクになります。設計を始める前に、まずこの足し算で「回るのか・揺れるのか」を見抜けるようにしておきましょう。
平行四辺形リンク——姿勢を保ったまま平行移動する
四節リンクには、長さの選び方しだいでとても役に立つ特別な形があります。それが平行四辺形リンクです。向かい合う辺の長さを同じにする——つまりクランクとロッカーを同じ長さ、カプラーと固定リンクを同じ長さにすると、4本のリンクは動いてもつねに平行四辺形のままになります。
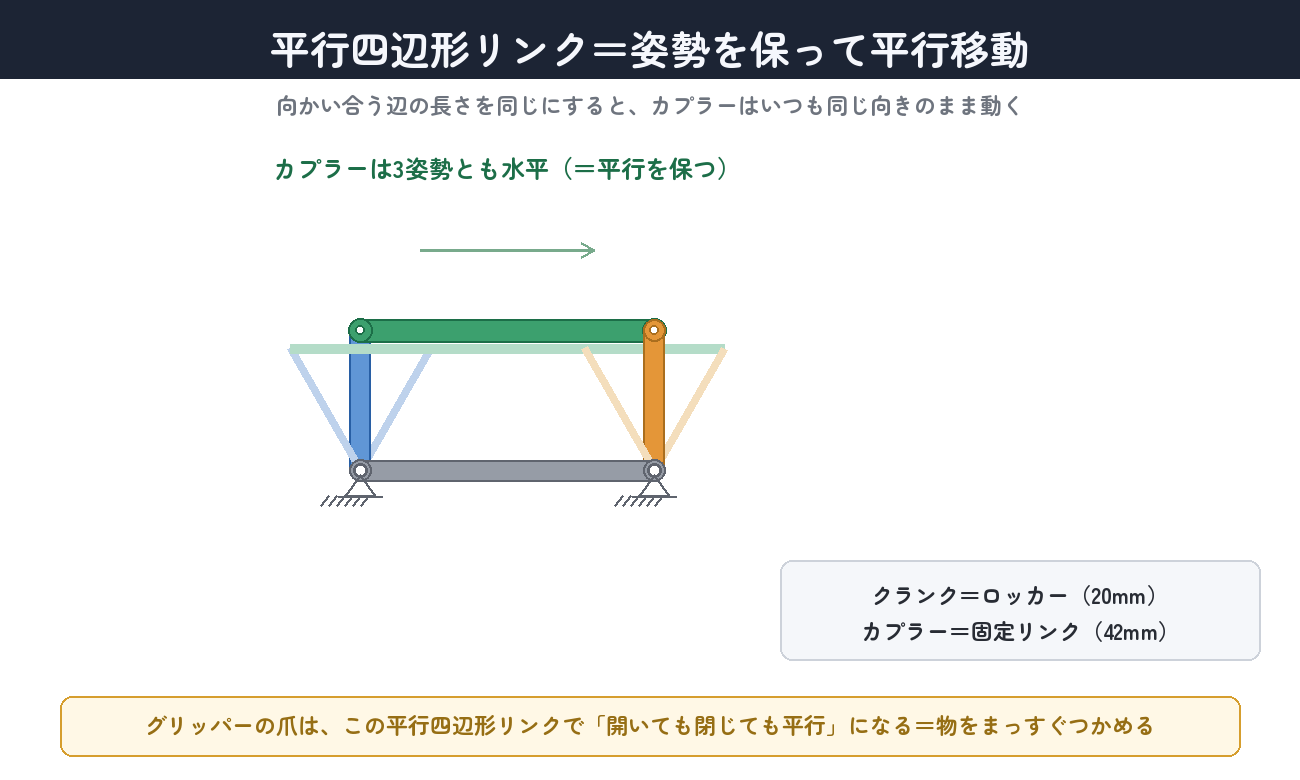
この形には魔法のような性質があります。平行四辺形では、カプラー(連結リンク)が向きを変えずに、姿勢を保ったまま平行移動するのです。クランクをどれだけ回しても、カプラーはいつも同じ傾きのまま、すーっと平行に動きます。FreeCADでカプラーの角度を計算してみると、動かしても角度のズレはほぼ0(小数点以下14桁まで0)——数値の上でも、完全に平行を保っていることが確かめられました。
なぜこれが役に立つのでしょうか。ここで、今回のゴールであるグリッパーの爪を思い浮かべてください。物をまっすぐつかむには、爪の面(つかむ面)がいつも平行でないと困ります。もし爪が斜めに傾きながら閉じたら、ボールやペットボトルのキャップはツルッとすべって逃げてしまいます。平行四辺形リンクを使えば、爪を開いても閉じても、つかむ面がいつも平行になる——これが、今回グリッパーに平行四辺形リンクを選ぶ理由です。
FreeCADでリンクバーを作る
理屈がわかったところで、リンク機構の基本部品「リンクバー」を実際に作ります。リンクバーは、両端に回転ジョイント(ピン穴)を持つ、ただの棒です。シンプルですが、ここで決める「2つの穴の間隔」がリンクの長さそのものになり、機構の動きを左右する大事な寸法になります。ワークベンチは前回までと同じPartDesignです。
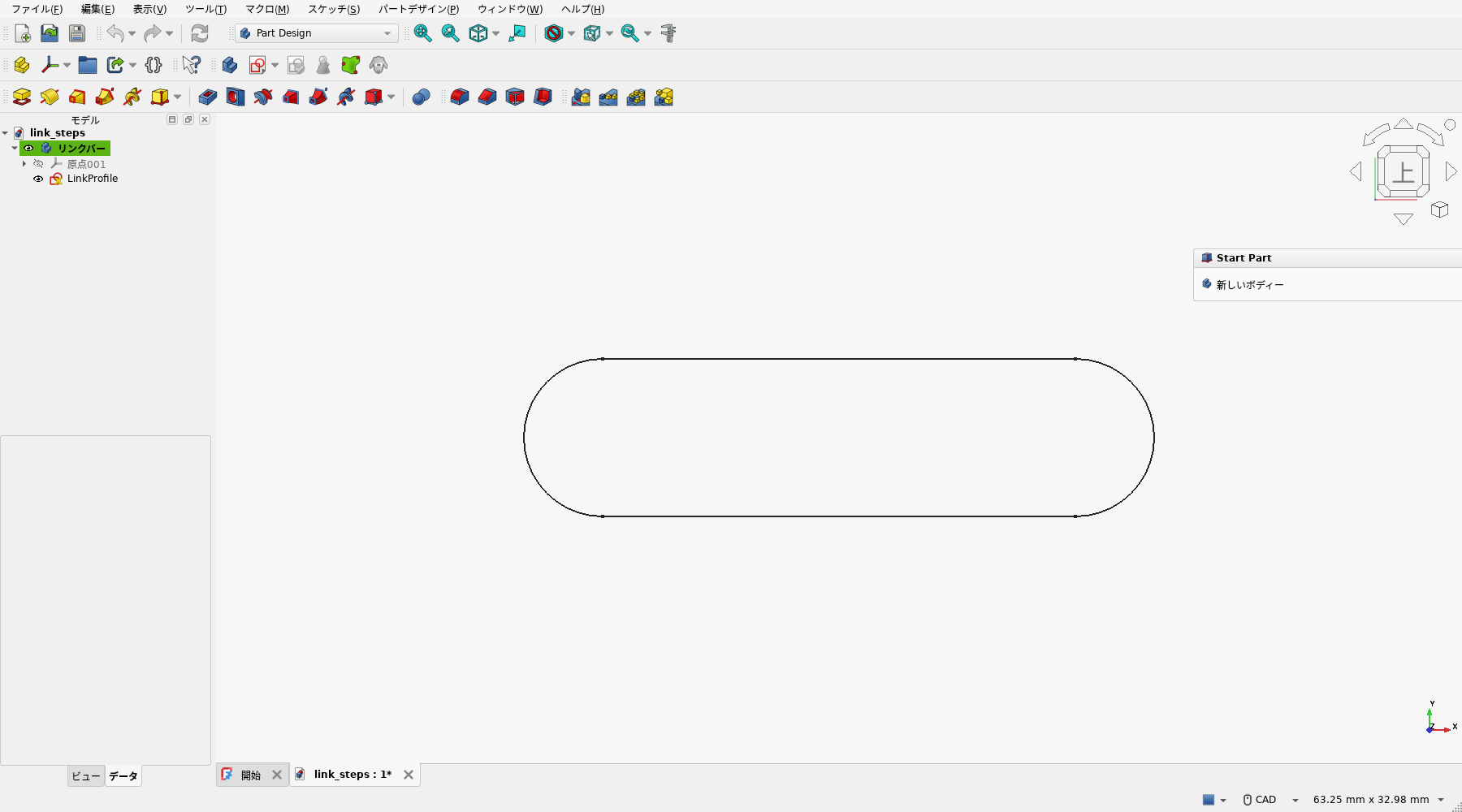
① スロット(長穴)形状の輪郭をスケッチする
Bodyを作ったら、平面にスロット(長穴)形状の輪郭を描きます。スロットは、両端が半円で、その間を2本の直線でつないだ「角丸の細長い形」です。両端の半円の中心が、そのまま2つのピン穴の位置になります。今回はリンク長を24mmにするので、左右の半円の中心を24mm離して描きます。
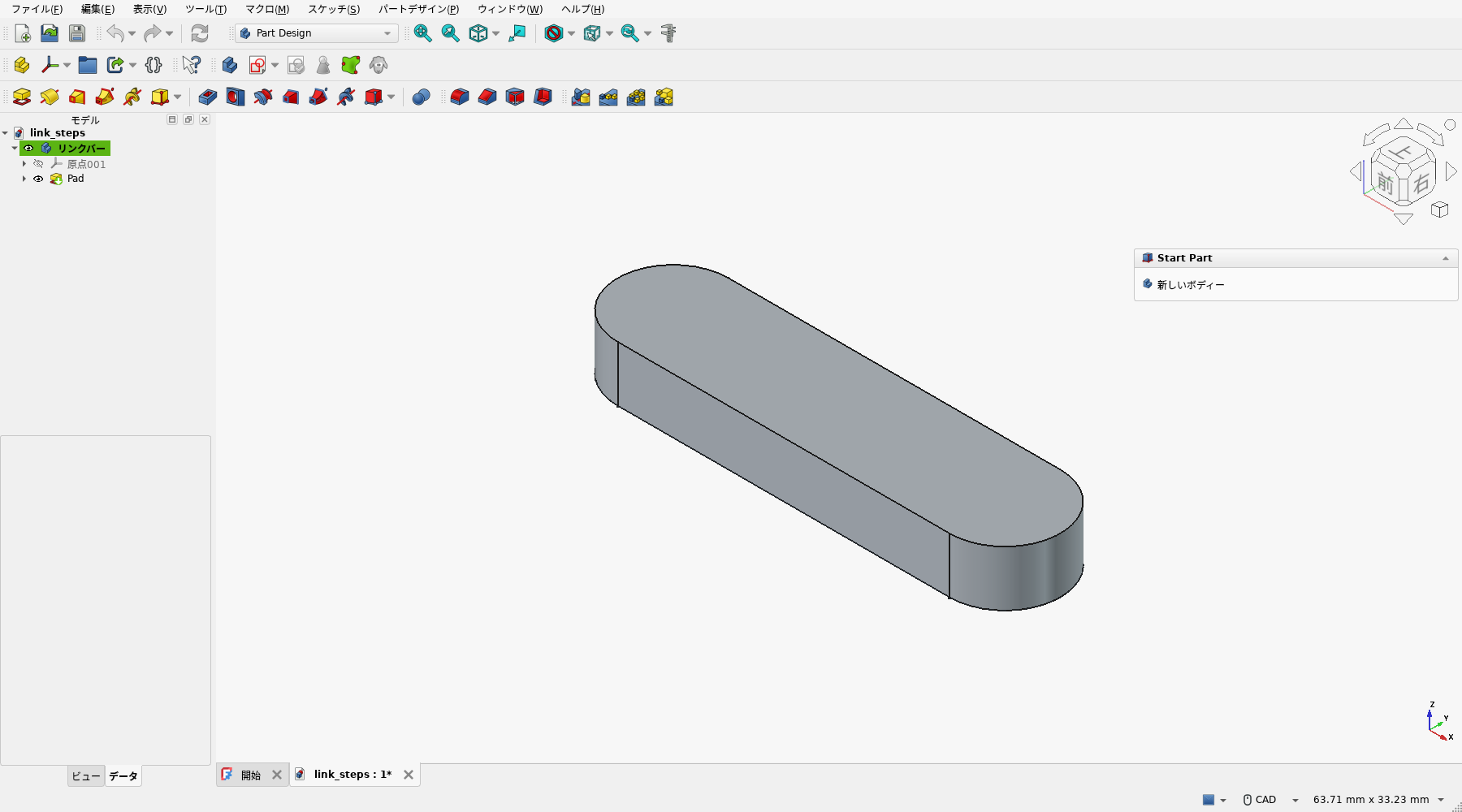
② パッドで厚みをつけて板にする
輪郭が描けたら、前回も使ったパッド(押し出し)で立体にします。リンクバーの厚みは4mmにしました。これで、角丸の細長い板——リンクバーの形ができあがります。
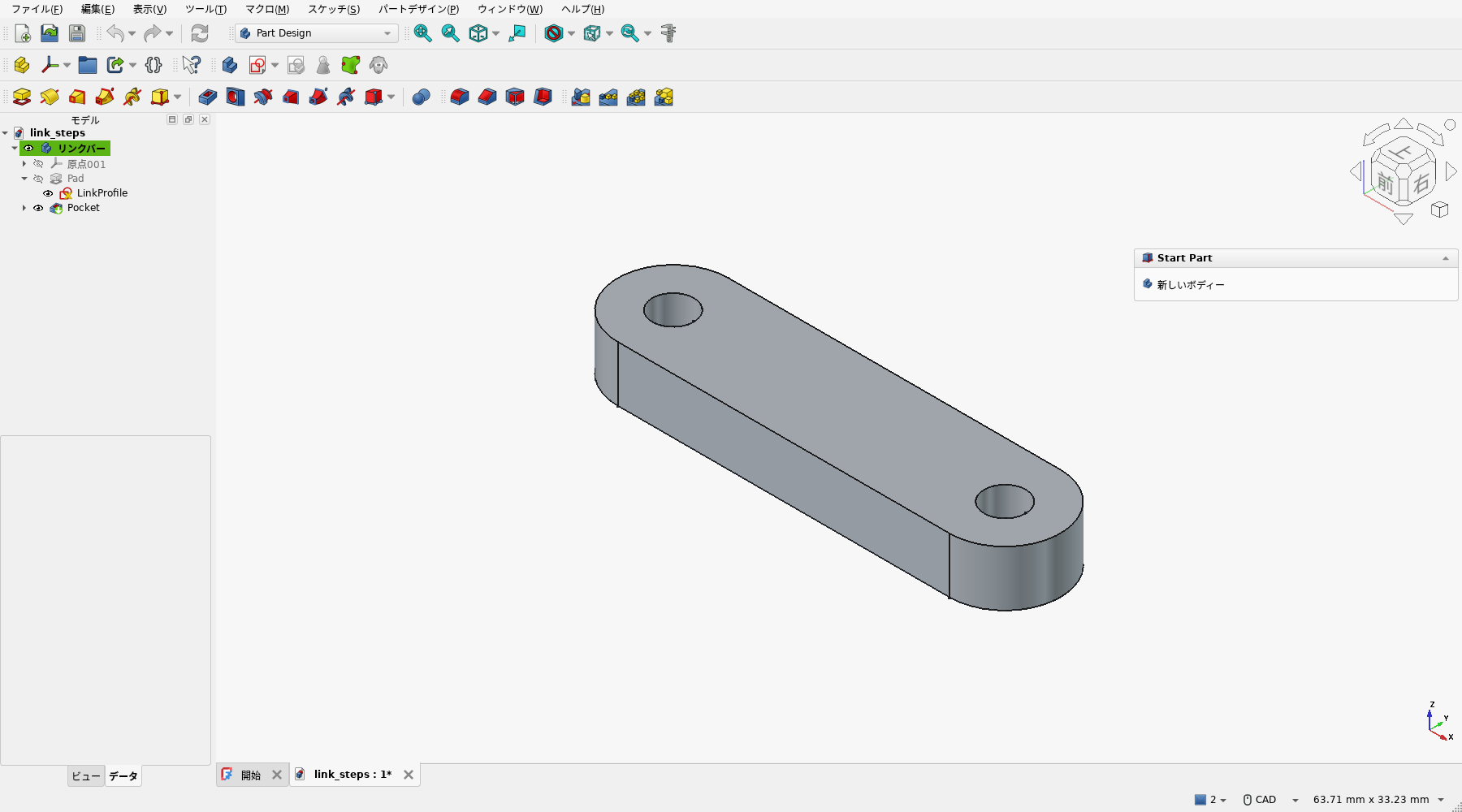
③ 両端に軸穴をあけて完成
最後に、ピンを通す軸穴を両端にあけます。リンクバーの上面に、両端の半円の中心と一致した円(Ø3mm)を2つ描き、ポケットで下まで貫通させます。この2つの穴が回転ジョイントになり、ここにピンを通して他のリンクとつなぎます。これでリンクバーが1本完成です。
リンク機構は、このリンクバーを長さ違いで何本か作って、ピンでつなぐだけで組み上がります。FreeCADにはアセンブリという機能があり、部品どうしを「回転ジョイント」でつなぐと、画面の中で実際に動かして確かめられます。穴と穴をピン(回転ジョイント)で結び、固定リンクをベースに固定すれば、クランクを回したときに機構全体がどう動くかを、組む前にシミュレーションできるのです。「自由度1」の機構なら、クランクをドラッグするだけで全体がついてきます。
今回の課題:平行ジョー・グリッパーを設計する
いよいよ第2部のゴール、グリッパー(物をつかむ手)を完成させます。今回作るのは平行ジョー・グリッパー——爪の面がいつも平行を保ったまま、左右対称に開いたり閉じたりするタイプのつかみ手です。これまで学んだ部品が、ここで全部つながります。
仕組みは2つの工夫でできています。
- ① 平行リンクで爪を平行に保つ:左右それぞれの爪を、2本の平行なリンクで支えます。これが §3 の平行四辺形リンクで、爪は開閉してもつかむ面が平行のまま。だからボールでも箱でも、まっすぐはさめます。
- ② ギアペアで左右を同期させる:左右の根もとに、前回 #07 で作った同歯数のギアペア(M1.5・Z14)を置きます。かみ合った歯車は必ず逆回転するので、サーボ1個で片方を回せば、もう片方が反対向きに同じだけ動き、左右の爪がきれいに対称開閉します。
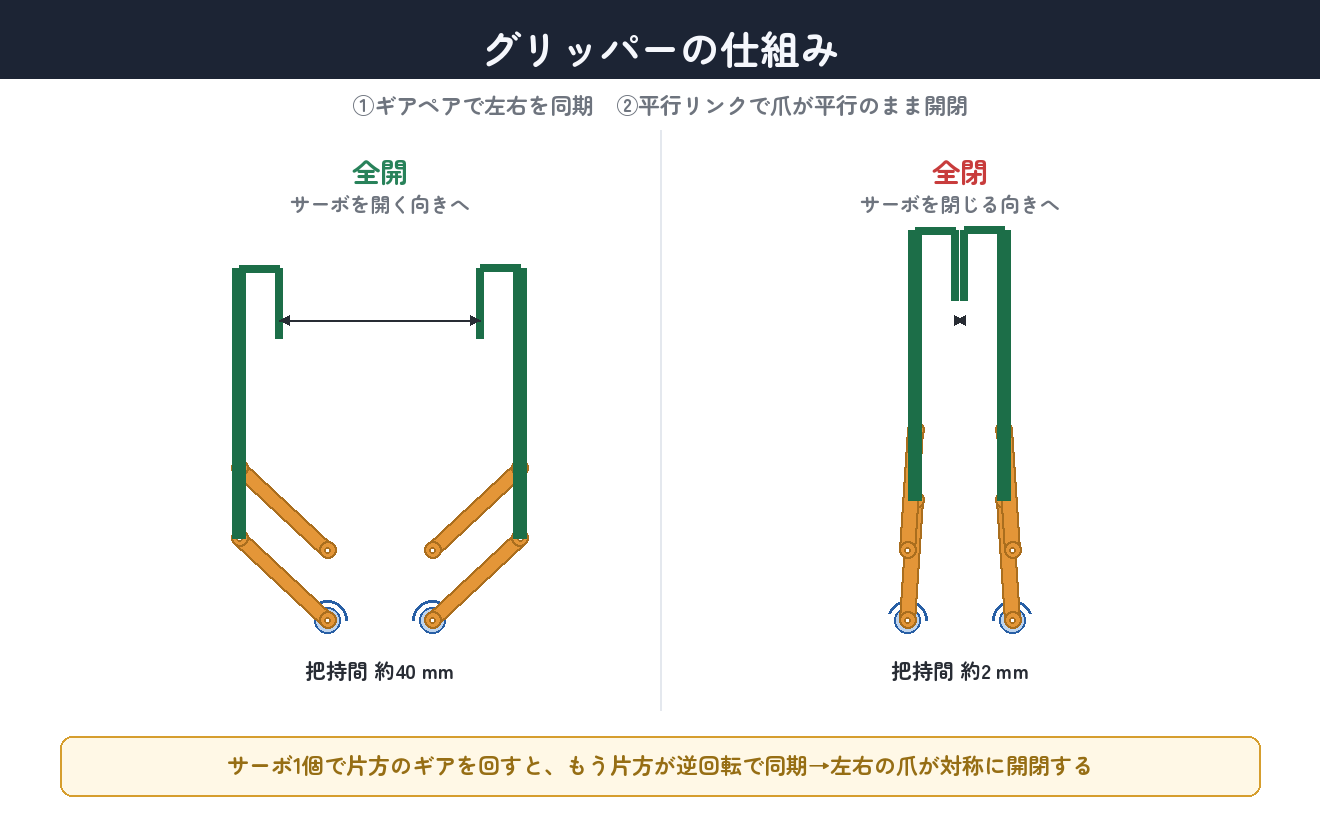
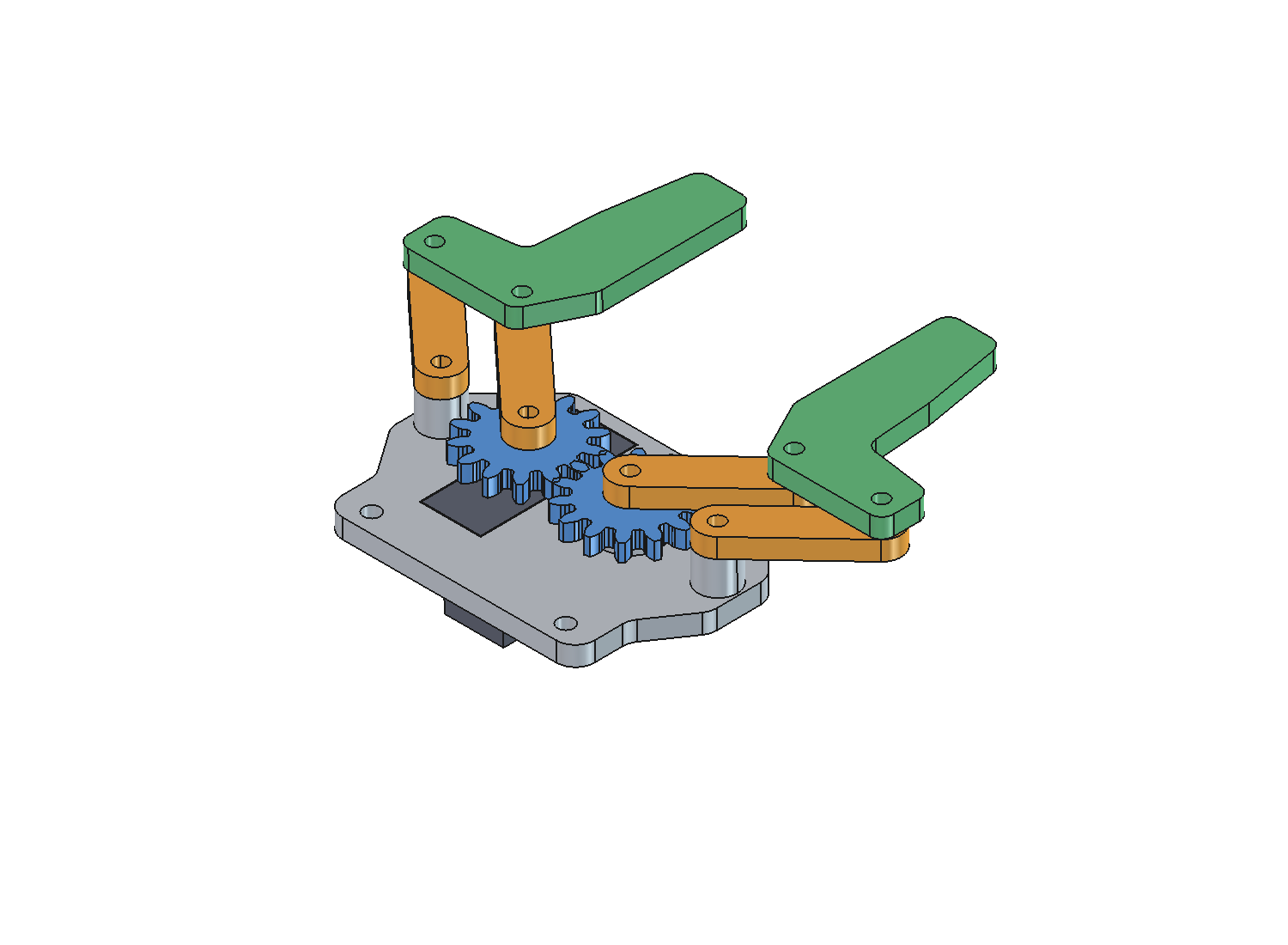
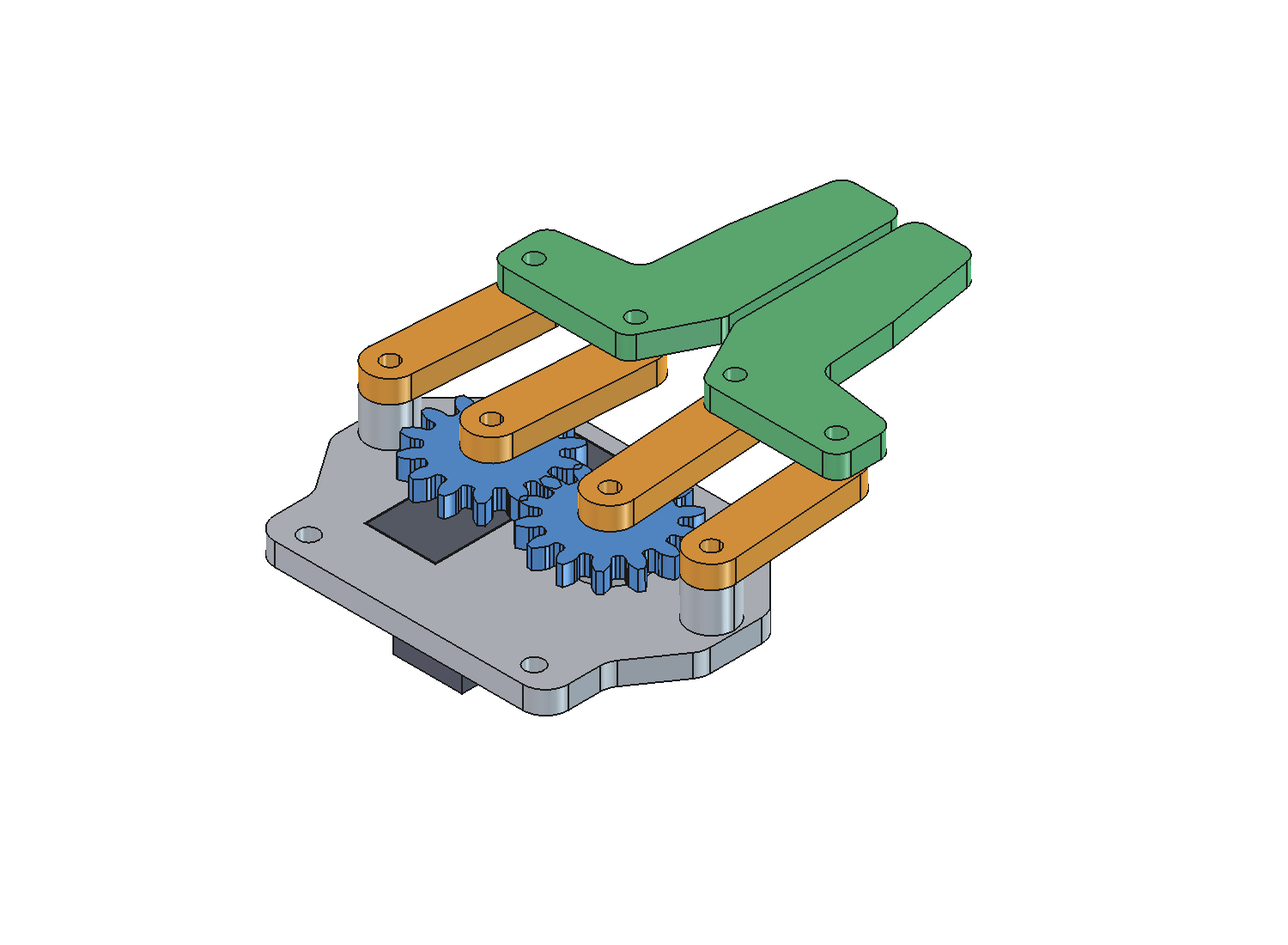
FreeCADで全部品を組んで、全開・全閉の姿勢を確認したのが次の図です。ベース(土台)の下にSG90サーボを落とし込み、その上に左右のギアペア、そこから2本ずつの平行リンクが伸びて、先端の爪を支えています。
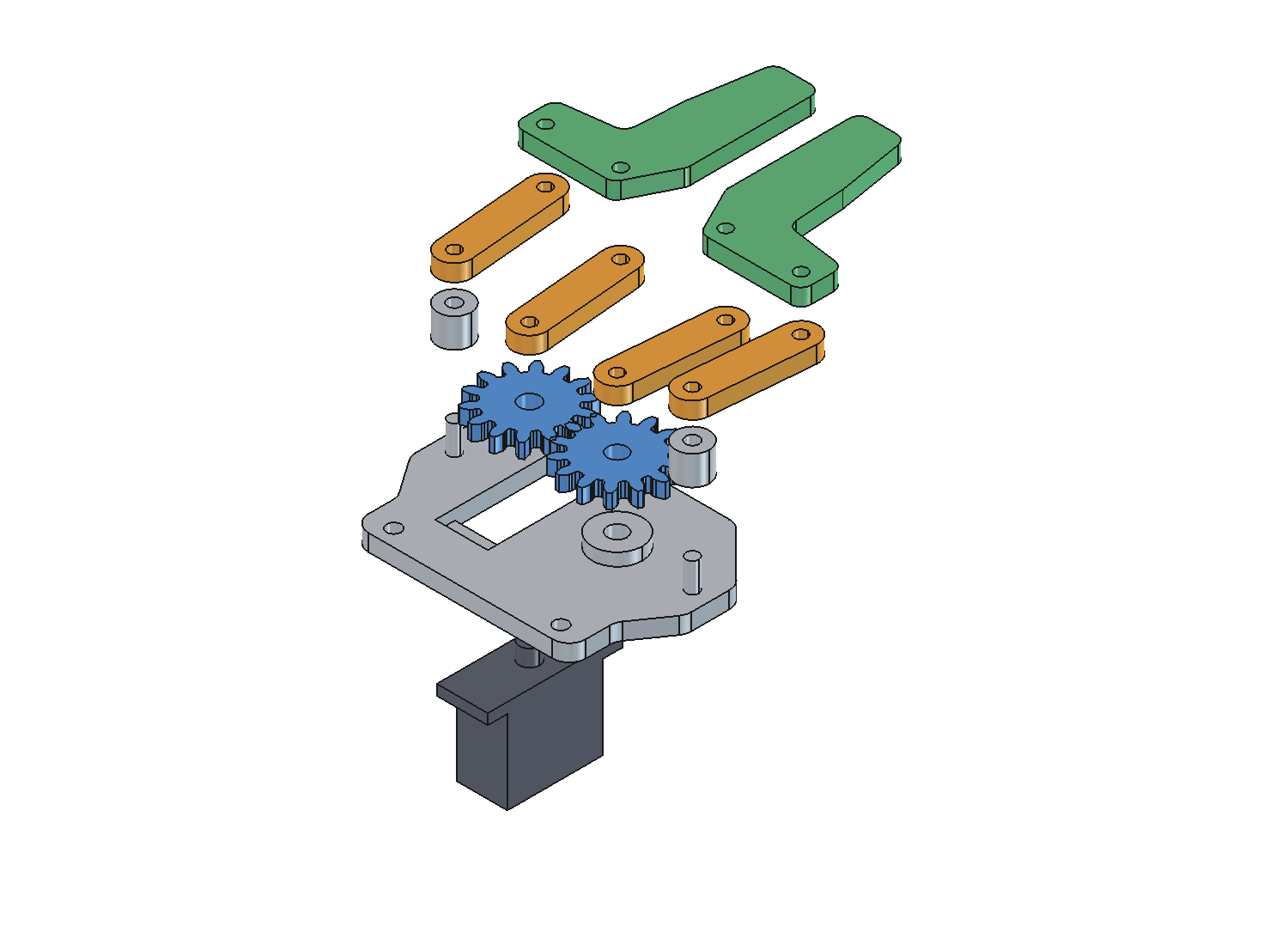
分解図を見ると、部品の構成がよく分かります。下から、サーボ→ベース→ギアペア→(外側リンク用の)スペーサー→平行リンク×4本→左右の爪、という順に重なっています。前回までに学んだ部品(はめあい・歯車)と、今回のリンクバー・爪・スペーサーだけで、ロボットの手がひとつ組み上がるのです。
課題
平行ジョー・グリッパーの「爪」と「平行リンク」を設計しましょう。ギアペアは前回 #07 のもの(M1.5・Z14・中心距離21mm)をそのまま使います。条件は次のとおりです。
- 平行リンクは長さ24mmのリンクバー(本文で作ったもの)。これを左右で4本使います。
- 左右それぞれ、ギア軸側の2つのピボットと、爪側の2つのピボットが平行四辺形になるように配置する。
- 爪は、付け根に18mm間隔の2つのピン穴を持ち、内向きに把持面を立てる。
- サーボ(SG90)はベースに落とし込み、駆動側のギア軸につなぐ。
- 全開と全閉で、左右の爪や部品がぶつからない(干渉0)ことを確かめる。
まず開閉のストロークを見積もってみましょう。爪が平行リンクの先で円を描いて動くので、リンクの角度を変えると爪どうしの間隔が変わります。どのくらい開いて、どのくらい閉じれば、ねらった物(ピンポン玉やキャップなど)をつかめるか、考えてみてください。
解答・設計のヒント(クリックで開く)
平行四辺形の作り方
片側の爪を、同じ長さ(24mm)の平行リンク2本で支えます。ギア軸側の2つのピボットの間隔と、爪側の2つのピボットの間隔を同じ(18mm)にすれば、リンク2本+ギア軸間+爪付け根間で、つねに平行四辺形ができます。平行四辺形なので、リンクがどの角度でも爪の付け根の辺は地面(ギア軸の辺)と平行=爪の面が平行に保たれます。このとき2本目のピボットは外側(中央から離れる向き)にずらすのがコツです。前後(爪の動く向き)にずらすと、開閉の途中でリンク2本が一直線に重なって畳まれてしまうからです。
外側リンクのかさ上げ(スペーサー)
外側のリンクは、ギア軸ではなくベースの固定ピンにつながります。この固定ピンの位置には歯車の厚みのぶんだけ段差ができるので、そのまま外側リンクをつけると回転中に歯車にぶつかってしまいます。そこで、固定ピンにスペーサー(筒状のかさ上げ部品・Ø8/高さ7mm)をはめ、外側リンクを歯車の上面より高い位置に持ち上げます。今回は左右の固定ピン用に同じスペーサーを2個使います。
左右の同期
- 左右のギア軸を、前回のギアペアの中心距離21mmで置く(M1.5・Z14)。
- 片方の爪のリンクを左ギアに、もう片方を右ギアに固定する。ギアは逆回転するので、片方が開く向きに回ると、もう片方も同じだけ開く向きに動く=左右対称。
- 駆動側のギア軸の下にSG90サーボを置き、出力軸でギアを回す。サーボ1個で左右が動きます。
ストロークと開口量
今回の設計では、爪の付け根の間隔が全開で約56mm・全閉で約18mm(ストローク約38mm)動きました。把持パッドのぶんを引くと、実際につかめる開口は全開で約40mm・全閉で約2mm。ピンポン玉(直径約40mm)からペットボトルのキャップ(約30mm)、小さな箱まで、はさめる大きさです。
干渉チェック:全開・全閉のどちらでも、FreeCADで左右の爪+リンクの重なり体積を測ると0でした(衝突せずに開閉できる)。サーボもベースの落とし込み枠にぴったり収まり(干渉0)、ギア中心距離も前回と同じ21mmできれいにかみ合います。すべての部品の外形は最大66mm(ベース)で、家庭用3Dプリンタでそのまま印刷できます。
可動域と干渉チェック——動く部品の設計の山場
リンク機構や歯車のような「動く部品」には、止まっている部品にはない設計のポイントがあります。それは——「動かす全範囲」でぶつからないかを確かめることです。止まっている部品なら、その1つの姿勢でだけ干渉チェックすればよいですが、動く部品は、動く最初から最後まで、ずっと干渉0でなければなりません。
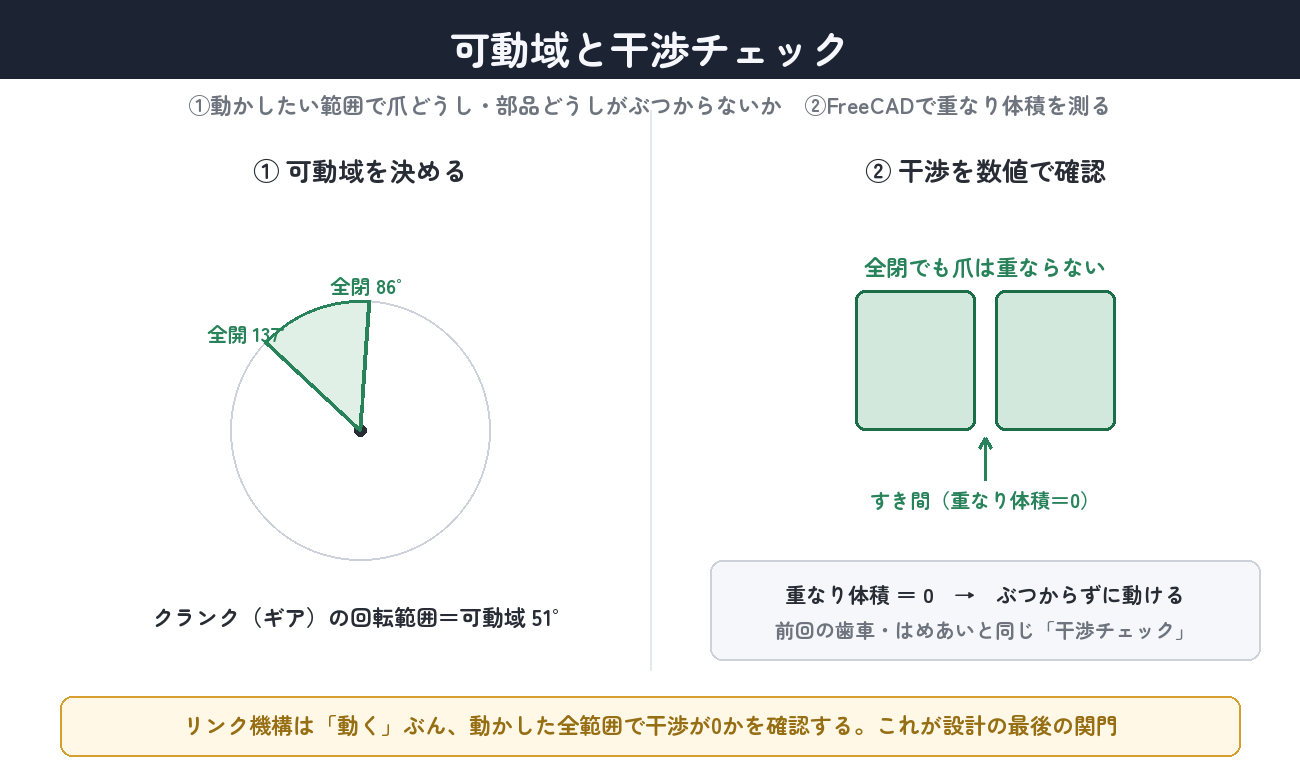
手順は2つです。まず① 可動域を決める。グリッパーなら「クランク(ギア)をどの角度からどの角度まで動かすか」を決めます。今回は全閉から全開まで、ギアを約51°動かす設計にしました。次に② その可動域の全範囲で、重なり体積が0かを確認する。前回 #06・#07 で使った「干渉チェック(重なりの体積を測る)」と同じ方法を、動かしながら何度も行うのです。
いちばん危ないのは、たいてい両端(全開と全閉)です。全閉では左右の爪が近づくので、爪どうしがぶつからないか。全開ではリンクが大きく開くので、リンクやベースと干渉しないか。今回の設計では、全開・全閉のどちらでも重なり体積は0mm³——つまり、サーボを端から端まで動かしても、どこにもぶつからずにスムーズに開閉できることが、数値で確認できました。
これが「動く部品の設計の山場」です。見た目で「だいじょうぶそう」と思っても、実際に動かすとどこかで引っかかることはよくあります。動かしてみて、全範囲で干渉0を数値で確かめてから印刷する——これがリンク機構を確実に動かすコツです。
つまずきポイント
- クランクが一回転しない(途中で止まる):グラスホフの条件を満たしていません。最短+最長が残り2本以下になっているか、4本の長さを足し算で確かめましょう。揺動だけでよいなら問題ありませんが、モーターでぐるぐる回したいときは条件が必須です。
- 爪が平行にならない(斜めに閉じる):平行四辺形がくずれています。向かい合う辺の長さ——リンク2本が同じ長さか、ギア軸側と爪側のピボット間隔が同じかを確認します。1mmでもちがうと、平行は保てません。
- 平行四辺形が途中で形を変えてしまう:リンクが一直線(伸びきった/折りたたまれた)になる特異点を通ると、平行四辺形が裏返ることがあります。可動域を特異点の手前まで(リンクが一直線にならない範囲)にとどめるのが安全です。
- 左右が同じ向きに動いてしまう:ギアを1枚しか使っていないか、奇数枚です。かみ合った2枚は逆回転します。左右対称にするには、左右の爪をそれぞれ別のギアに固定します。
- 全閉で爪どうしがぶつかる:閉じ切る角度が深すぎます。全閉の角度を少し浅くするか、把持パッドを小さくして、重なり体積が0になる位置まで戻します。
- ピン穴がきつくて動かない/ガタガタ:前回の「すき間(クリアランス)」と同じ問題です。ピン径+0.2〜0.4mmくらいの穴にすると、スムーズに回ってガタも少なくなります。
まとめ
- リンク機構は、棒(リンク)をピンでつないで「決まった動き」を作る部品。歯車が回転を伝えるなら、リンクは動きの形を設計する。
- 四節リンク=4本のリンク+4つの回転ジョイント。固定・クランク(入力)・カプラー・ロッカー(出力)。自由度は1(入力1つで全体が決まる)。
- グラスホフの条件:(最短+最長)が(残り2本)以下なら、最短リンクが一回転できる(クランクロッカー)。
- 平行四辺形リンク:向かい合う辺を同じ長さにすると、カプラーが姿勢を保って平行移動する。これで爪を平行に保てる。
- リンクバーはスケッチ(スロット)→パッド→両端の軸穴で作る。穴の間隔がリンク長。
- 平行ジョー・グリッパー=平行リンクで爪を平行に保ち、ギアペアの逆回転で左右を同期。サーボ1個で対称開閉。
- 動く部品は、可動域の全範囲で干渉0を数値で確かめてから印刷する。危ないのは全開・全閉の両端。
これで第2部「貫通プロジェクト」の主要な部品——車輪・ケース・歯車・リンク機構——がそろいました。次回からは、ここまで作ってきた部品を1台のロボットに組み上げる「アセンブリ」に進みます。バラバラの部品が、画面の中で1つのロボットとして動き出す——その瞬間を目指しましょう。
【応用のヒント】① グラスホフの条件を使って、自分で「クランクロッカー」になる4本の長さの組み合わせをいくつか見つけてみましょう。逆に、わざと条件を外して「両側が揺動するだけ(ダブルロッカー)」の機構も作れます。② 平行四辺形リンクは、製図台のアームや卓上ライト、パンタグラフにも使われています。身のまわりで「平行を保って動くもの」を探すと、たいていこの仕組みが隠れています。③ 爪の先の形を変えると、つかめる物が変わります。V字の溝をつけると丸い物(ボールやペン)が安定し、平らなパッドにゴムを貼ると箱や本がすべりにくくなります。つかみたい物に合わせて、爪をカスタマイズしてみましょう。
部品ファイル
この記事で作ったリンク機構とグリッパーの FreeCAD ファイルをまとめて置いておきます。本文の四節リンク(クランク・カプラー・ロッカー)と、課題の平行ジョー・グリッパー一式(ベース・平行リンク・左右の爪・スペーサー・前回のギアペア・SG90ダミー)が入っています。中を開いてツリーの履歴をたどると、スケッチ→パッド→軸穴の順で作ったことが分かります。