
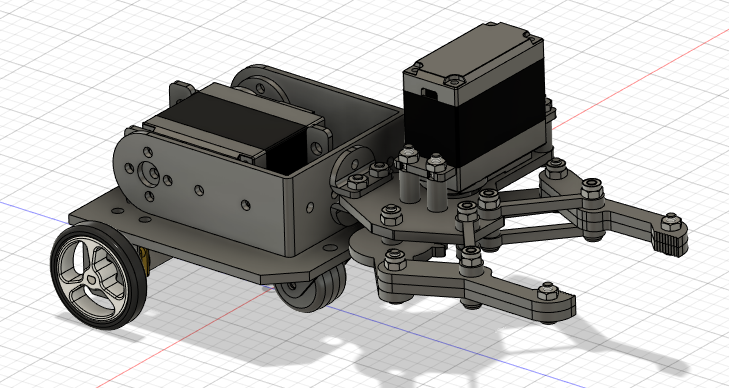
前回は作成したモデルを組み立てて、ロボットの足回りを作りました。

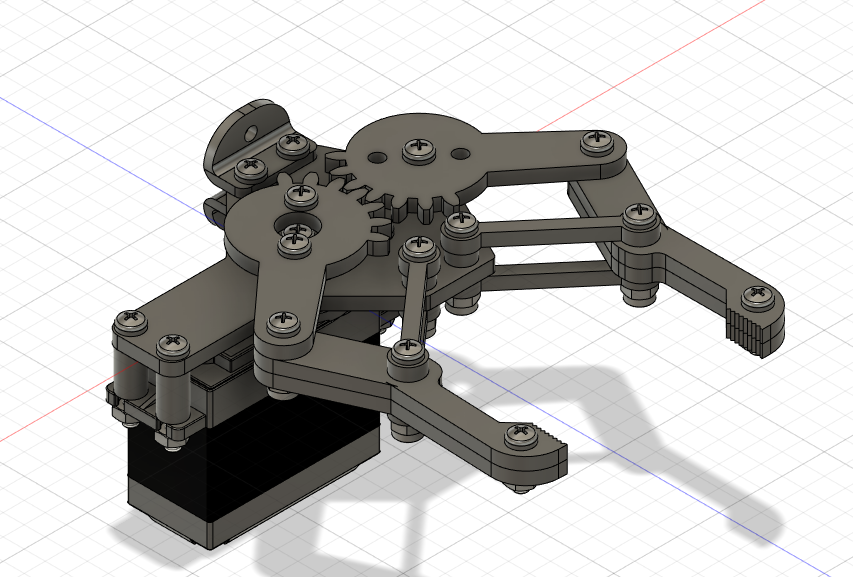
今回はその上にRCサーボモータで動くロボットアームを乗せてみましょう。
前回は部品を固定していくだけでしたが、今回と次回は稼働する部品のモデリングとを組み立てを行います。
今回は複雑なモデルはどのようにモデリングしたらよいかを学んでみましょう。

ロボットアーム部品の作成
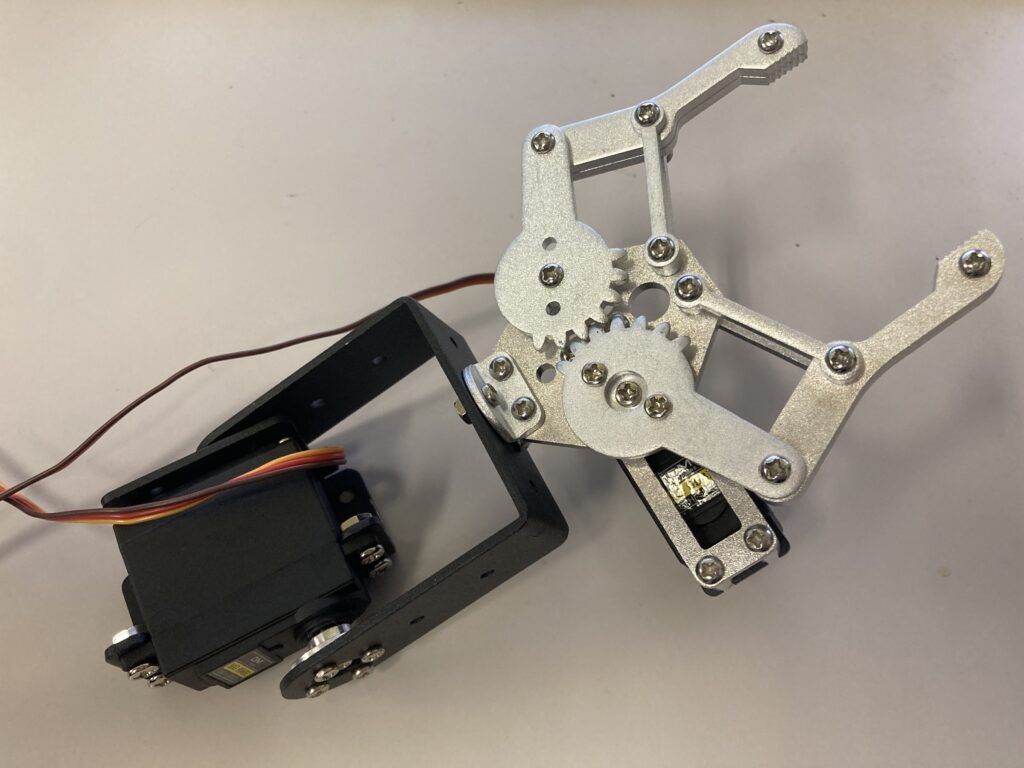
実際に作成する事も意識したいので、今回はAmazonで実際に購入することが出来るロボットハンドのモデリングと組み立てを行います。
1000円程度で購入可能で、汎用的なサーボモータで動きます。
評価は低いですが、ネジの締め付けを調整すればがたつきも少なく、ちゃんと使えます。
アルミ合金 6自由度ロボットアーム

私も実際に使っています。
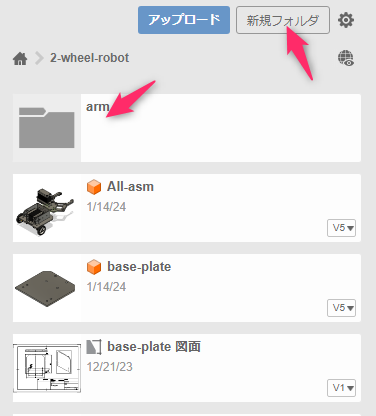
ファイルが多くなっていきますので、フォルダを作成し、その中で作業してゆきましょう。
歯車のモデリング
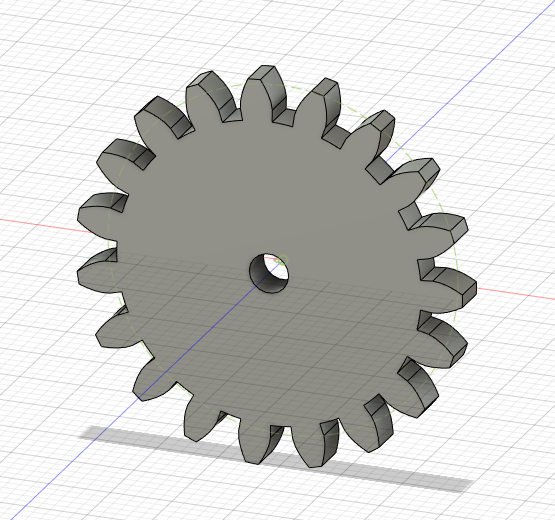
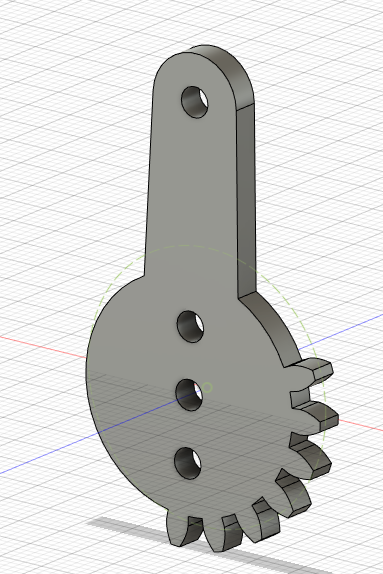
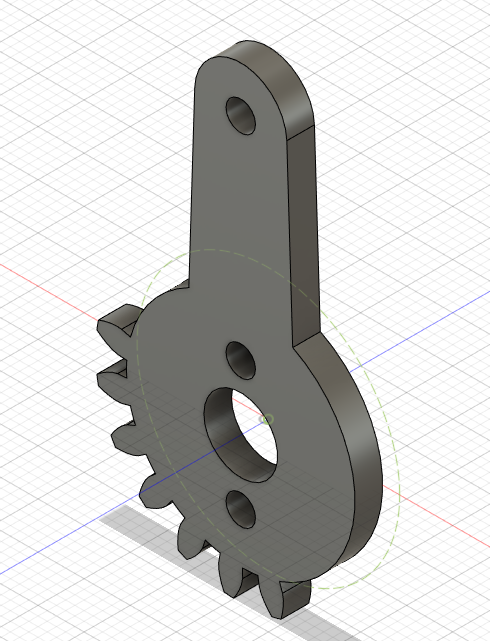
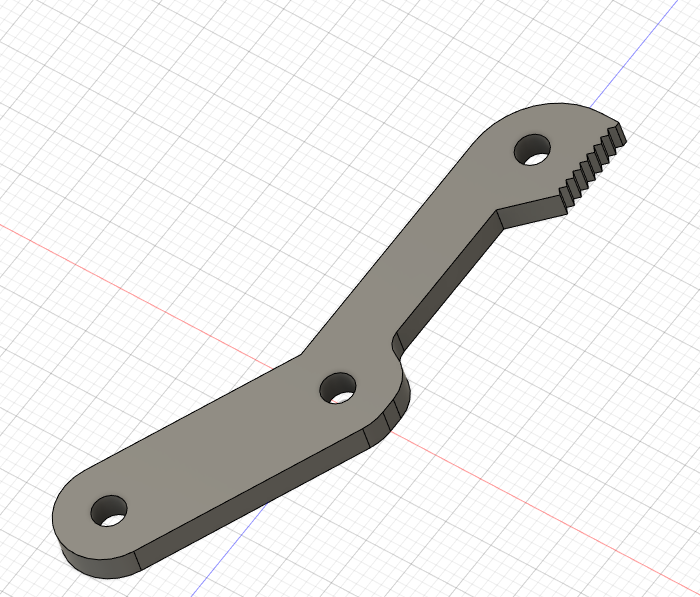
こちらの部品を作っていきます。名前はarm-gear-lとしています。
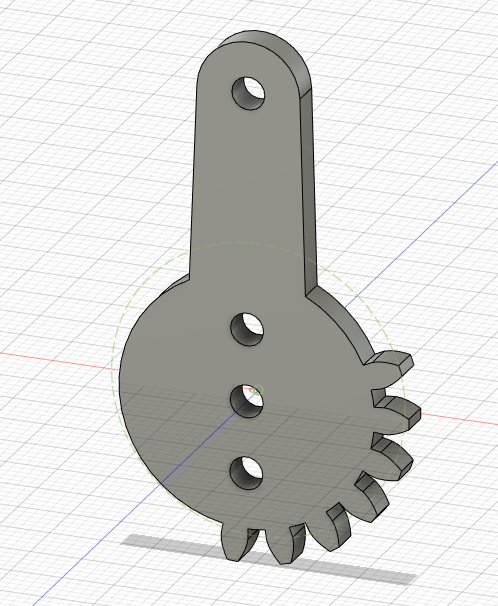
一部が歯車になっており、一見するとかなりモデリングは大変そうです。
Fusion360には歯車やネジを一括で作るためのスクリプトが用意されており、簡単に作ることが出来ます。
ユーティリティ>アドイン>スクリプトとアドインをクリックします。
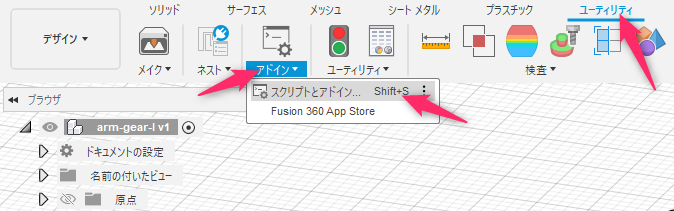
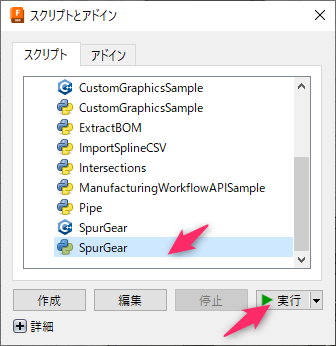
SpurGearを選択し、実行をクリックします。
歯車のパラメータを設定すると自動的にモデリングが行われます。
下記の通りに入力します。
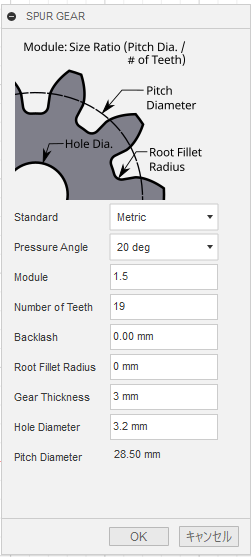
- Standard
規格を選びます。Englishはインチ単位になってしまいますのでMetricを選択してください。
- Pressure Angle
圧力角を指定します。歯車同士がかみ合う際にどのような角度で伝達するかを示す値です。2つの歯車が同じ値でないとかみ合いません。通常は20度です。今回は変える必要はありません。 - Module
歯車の大きさを表す規格です。2つの歯車で同じモジュールにする必要が有ります。モジュールと歯の数で後述されるピッチ円が決定されます。ピッチ円=モジュール×歯数 既製品はキリの良い数字になっています。今回は1.5とします。 - Number of Teeth
歯の数です。この数を調整する事で減速比やピッチ円を変えることが出来ます。今回は19で作ります。 - Backlash
歯車がかみ合った際の遊びの大きさです。通常は0では抵抗が大きくうまく回りません。今回は歯車同士の距離でこのバックラッシを調整するので、0にしておいて問題ありません。 - Root Fillet Radius
歯の付け根に着けるフィレットの値です。モジュールに対して大きすぎるとうまく歯車が生成できません。今回の製品はフィレットがかかっていませんでしたので0としています。 - Gear Thickness
歯車の厚みです。今回は3㎜です。 - Hole Diameter
歯車の真ん中に空ける穴です。今回はM3のネジで締結される為、3.2㎜の穴をあけておきます。 - Pitch Diameter
ピッチ円の直径が自動計算されます。通常2つの歯車のピッチ円が接するように歯車を配置する事でうまくかみ合うようになっています。
OKを押すと自動で歯車が作られます。
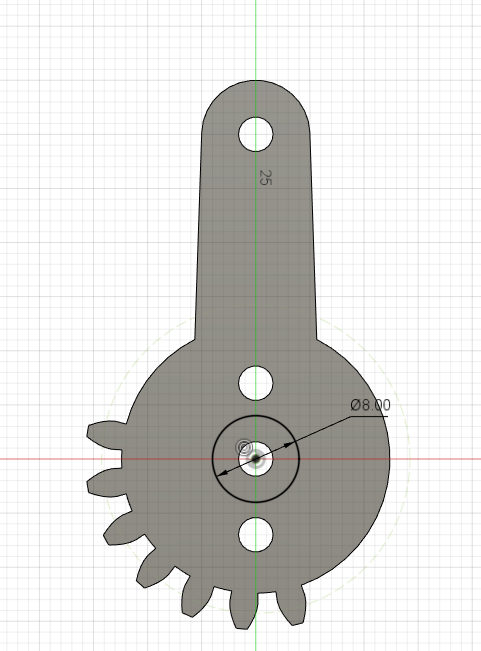
実際の製品を観察して、歯をいくつか削り取ります。
表面に下の図の通りスケッチを行います。
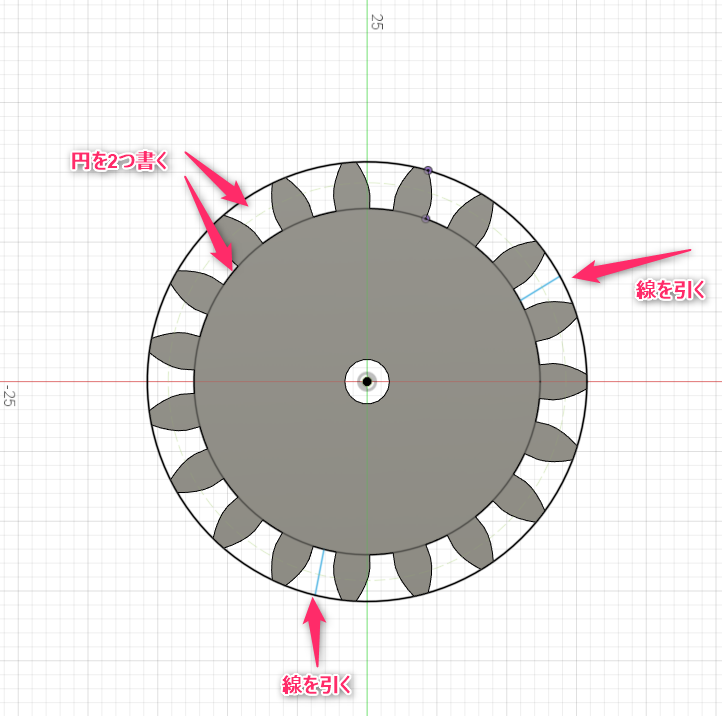
押し出しで切り取りを選択し、歯を削り取ります。
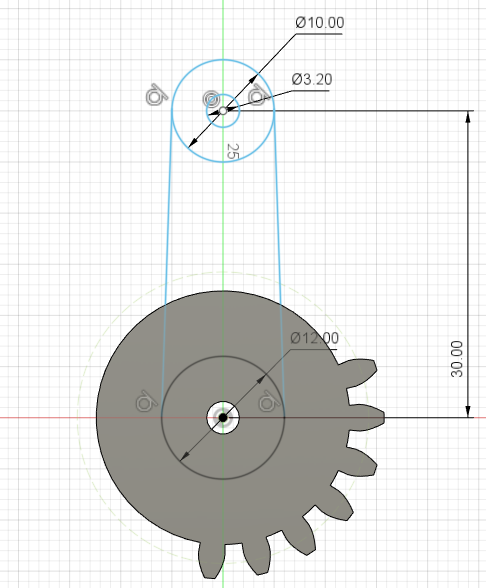
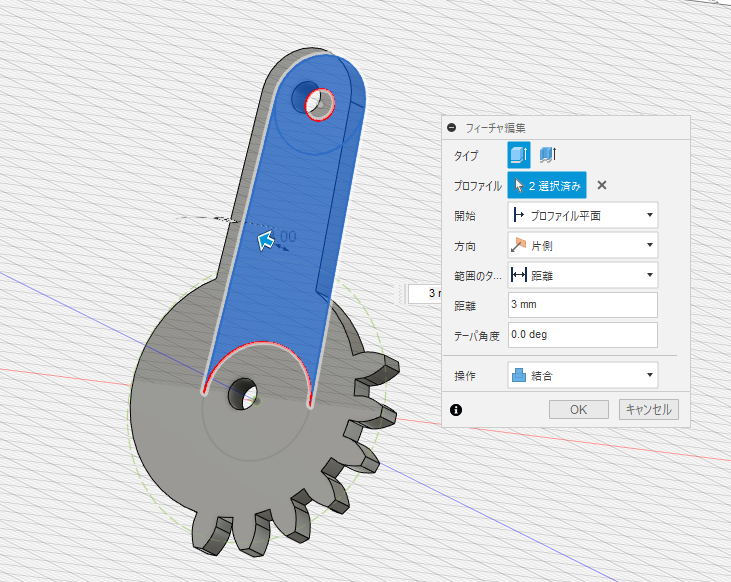
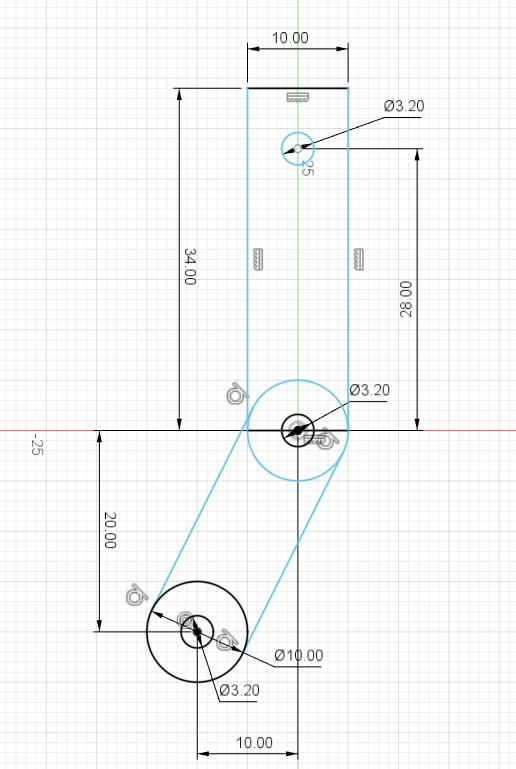
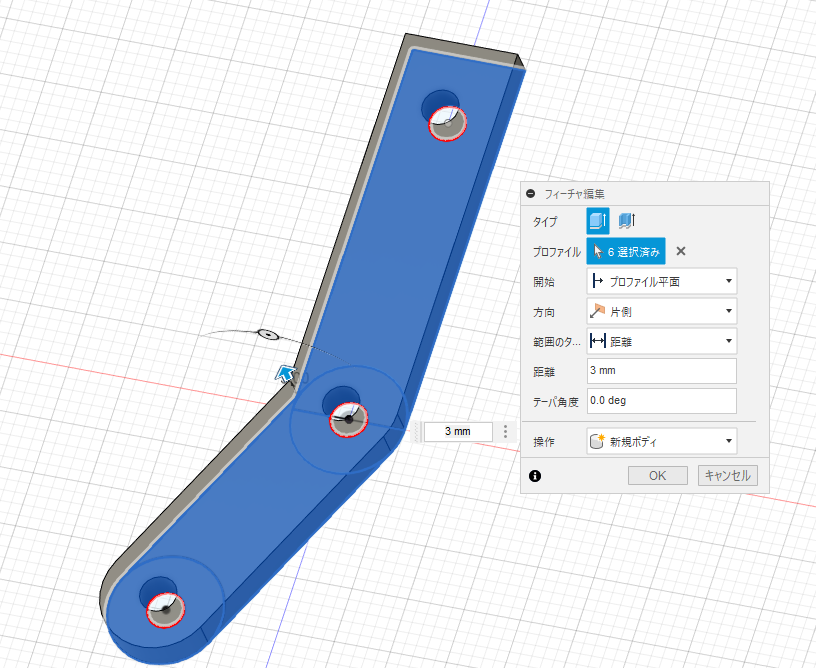
リンク部分を作ります。全面に下記の通りスケッチを行います。
3㎜で押し出します。
2つ穴をあける為に下記の通りスケッチします。
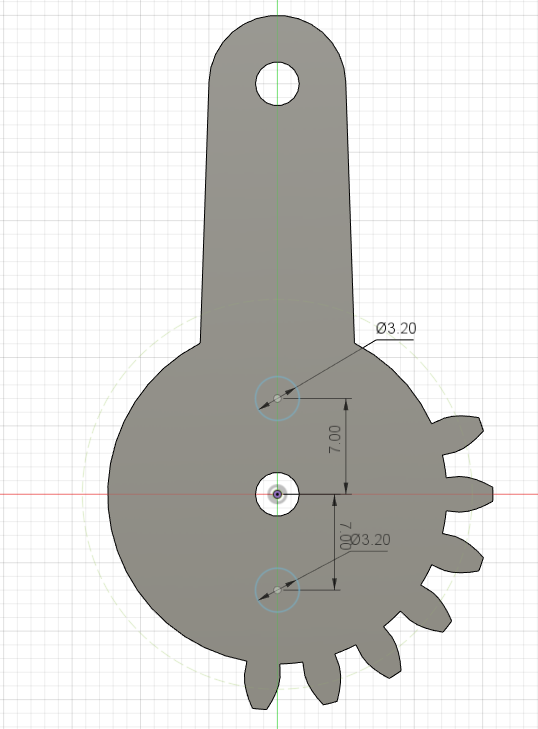
押し出しで切り取り完成です。
保存します。
パーツの流用と編集
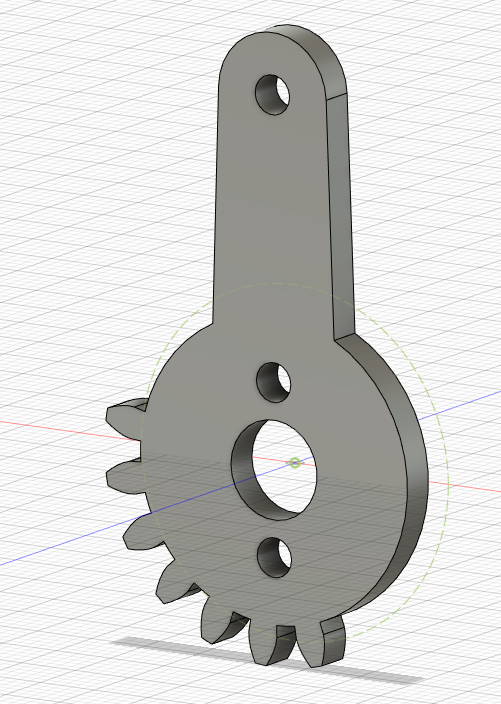
arm-gear-lを流用して反対側の歯車も作ります。
arm-gear-lを開いた状態で、ファイル>名前を付けて保存 arm-gear-rとしてください。
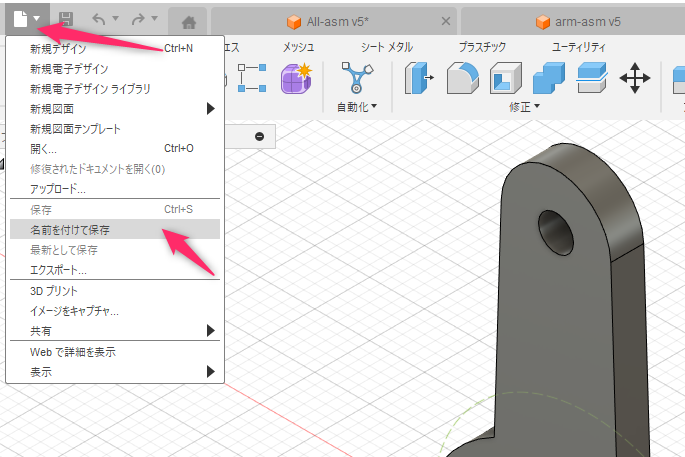
arm-gear-rを開いてください。
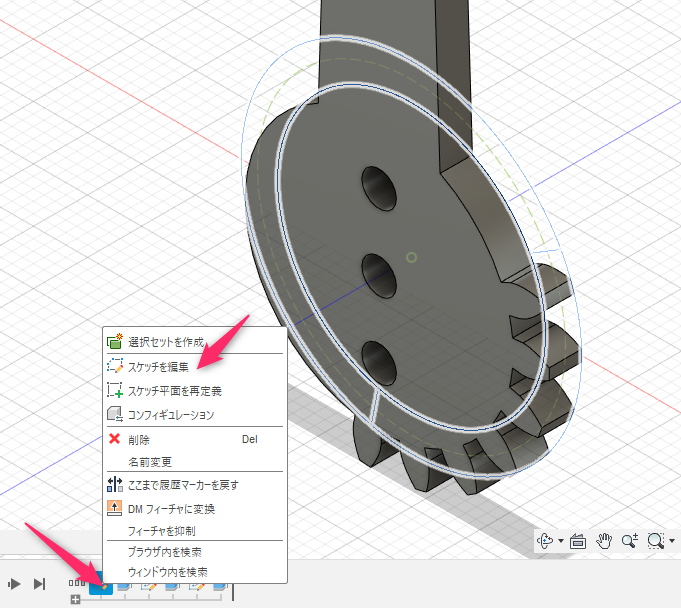
歯車の切り取る位置を変えたいので、デザイン履歴の最初のスケッチを右クリックし、スケッチを編集します。
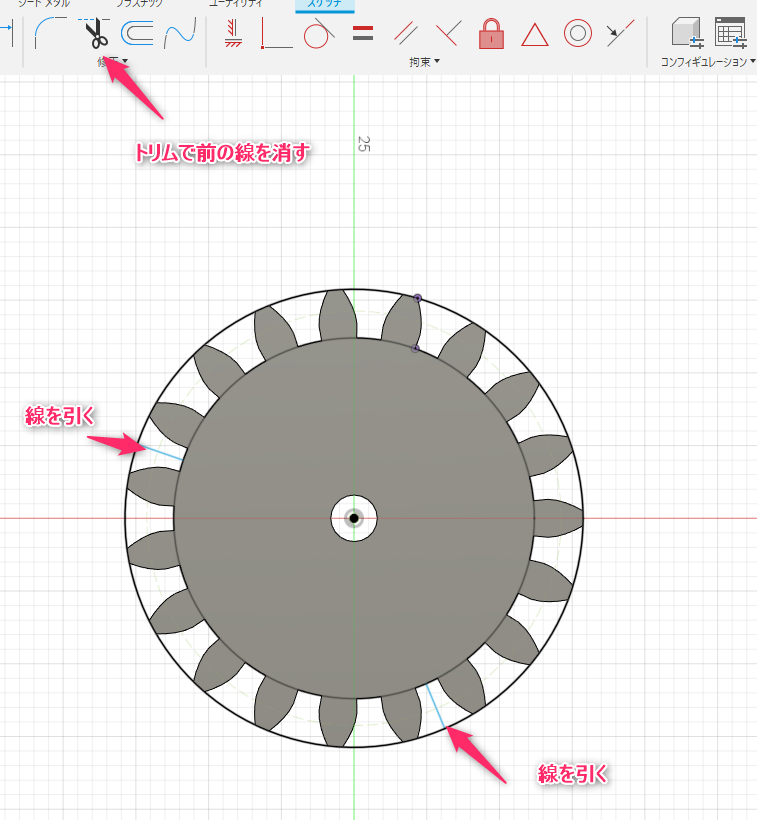
トリムで前の切り取り線を削除し、下の図を参考に新たに切り取る位置に線を引きます。
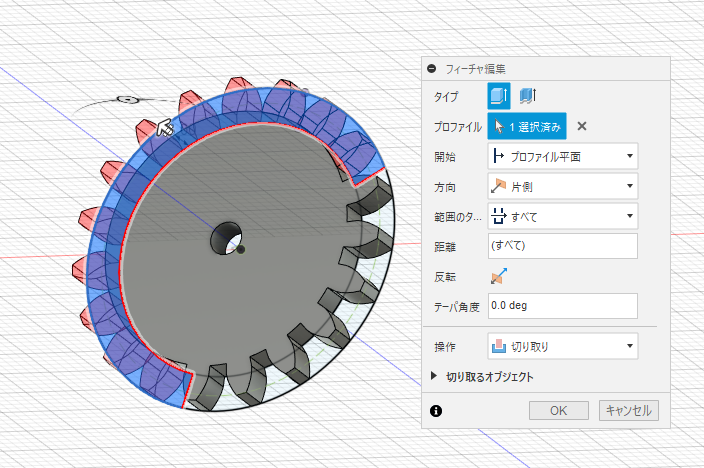
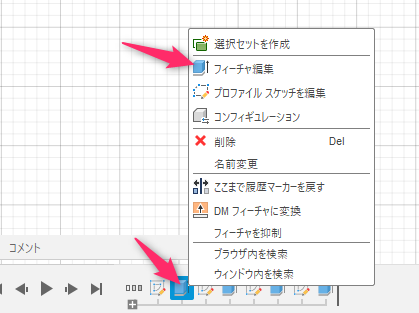
押し出しを右クリックし、フィーチャ編集をクリックします。
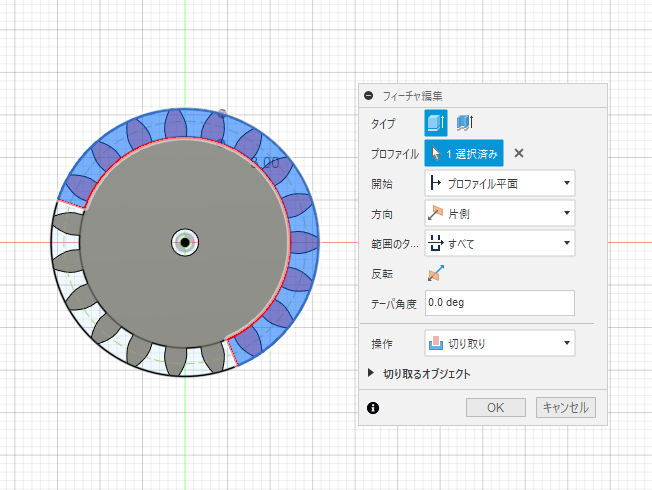
押し出して切り取る位置を下記の通り選択しなおします。
真ん中に8㎜の穴をあければ完成です。
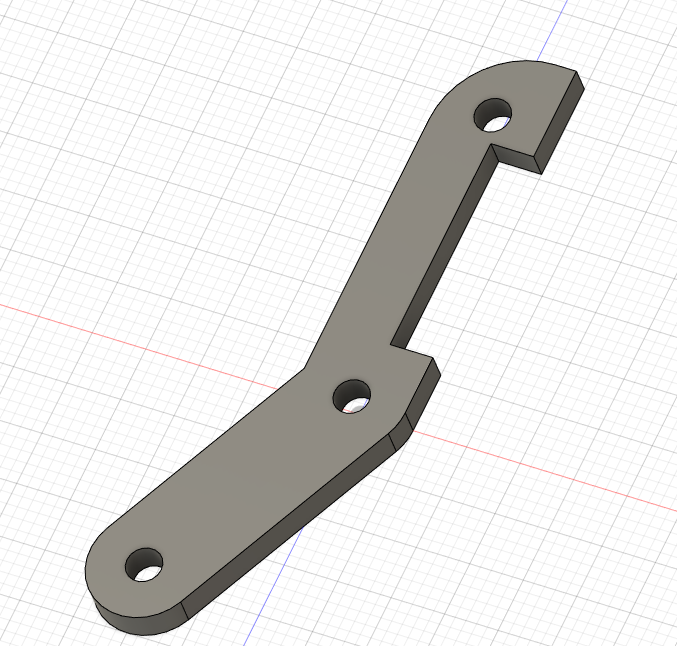
指パーツの作成
下記の部品を作っていきます。fingerという名前で新規作成します。
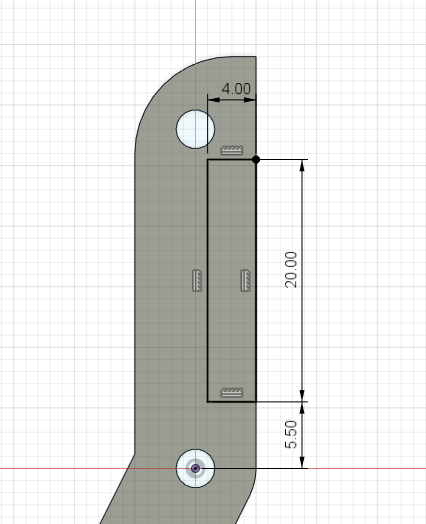
リンクの構成部品を作成する際は穴と穴の距離が重要になってきます。
穴を先にスケッチしてから、その後外周をスケッチします。下の図を参考にスケッチします。
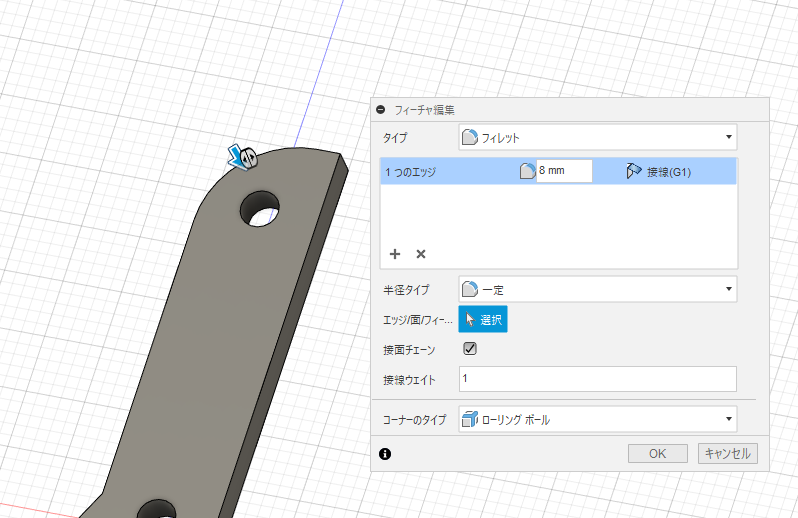
3㎜で押し出しします。
爪先を8㎜でフィレットをかけます。
指先を細くするためのくりぬきをスケッチします。
押し出して切り抜きます。
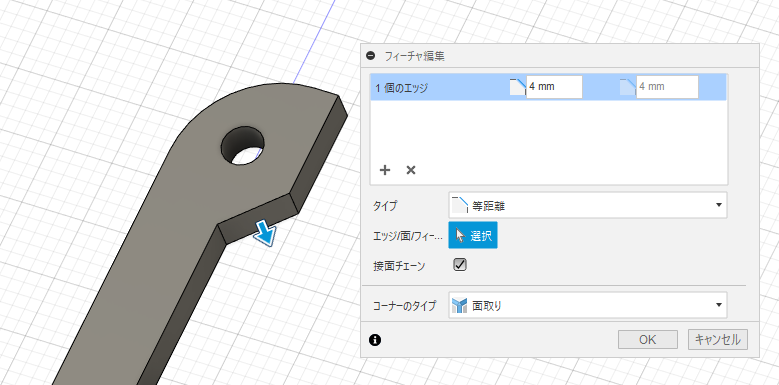
4㎜で面取りして指先の形を再現します。
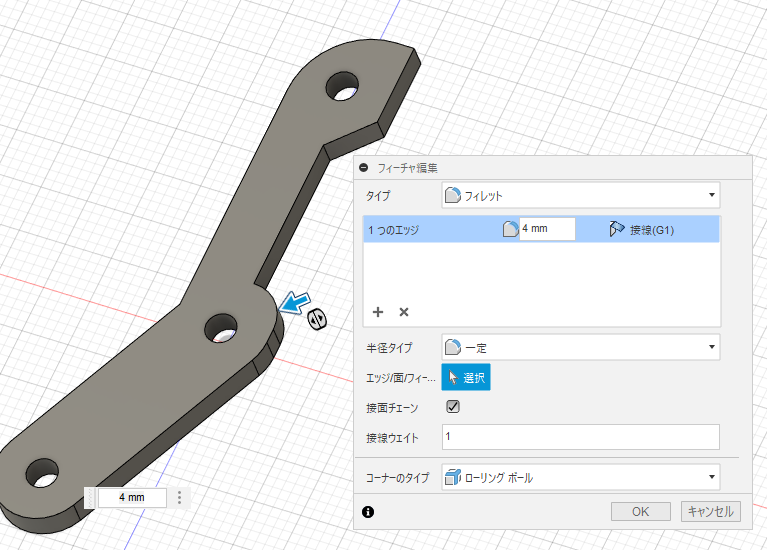
4㎜でフィレットを取ります。
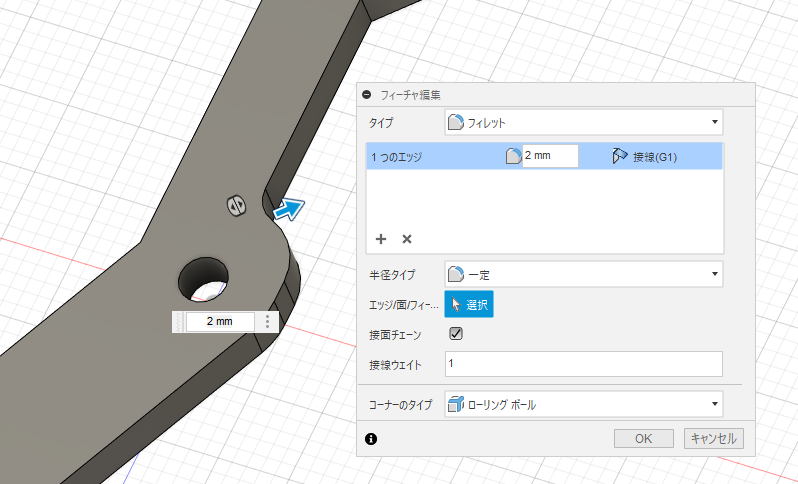
2㎜でフィレットを取ります。
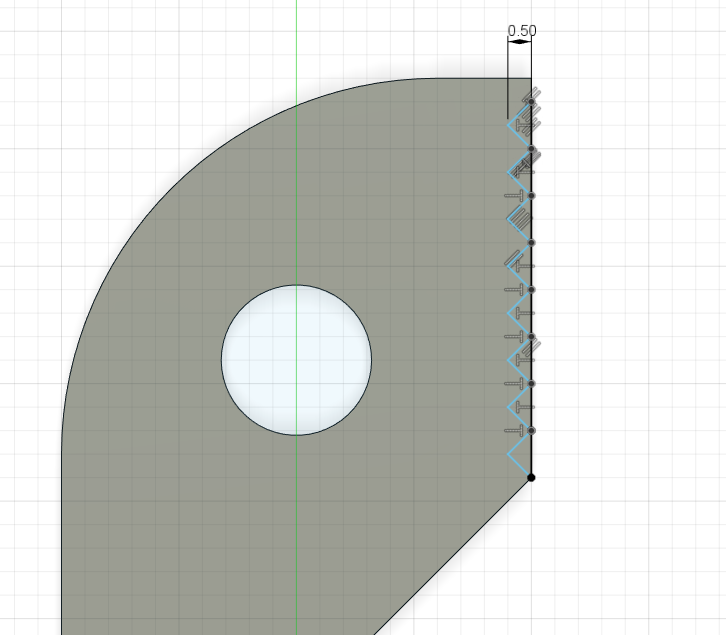
指先の滑り止めを再現します。
スケッチで直線ツールを使い、下の図の様に三角形45°、高さ0.5㎜で並べてゆきます。
押し出しで切り取れば完成です。
一見複雑な部品も落ち着いて押し出しと切り取りを繰り返せば、部品を作れます。
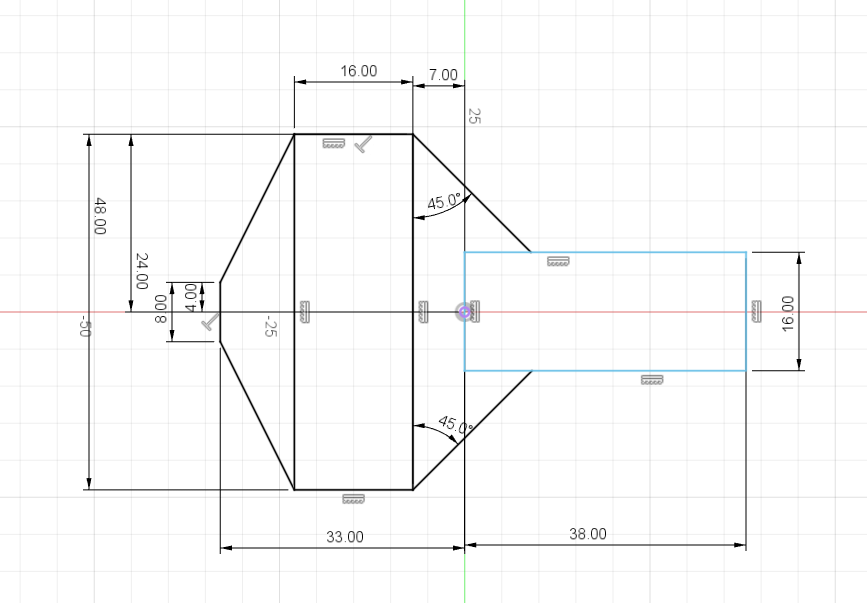
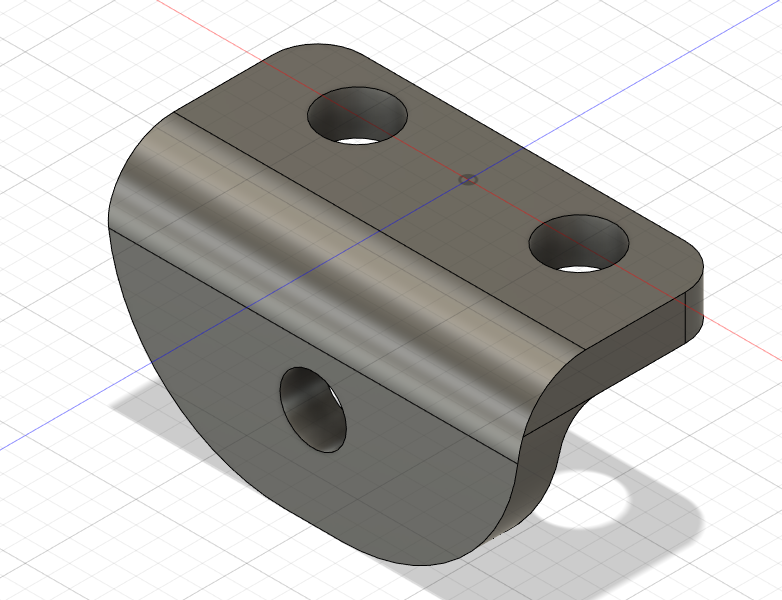
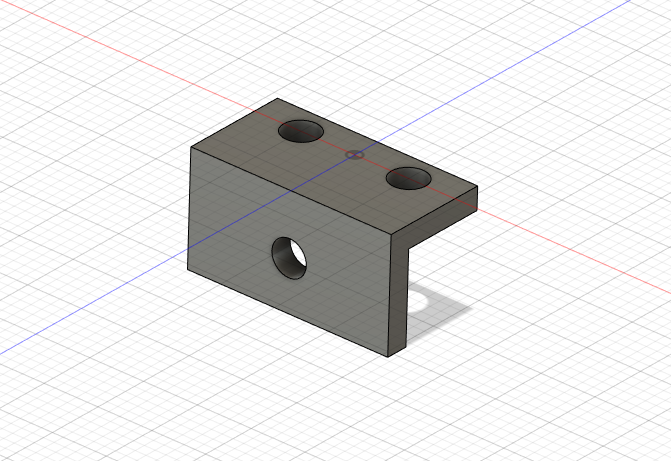
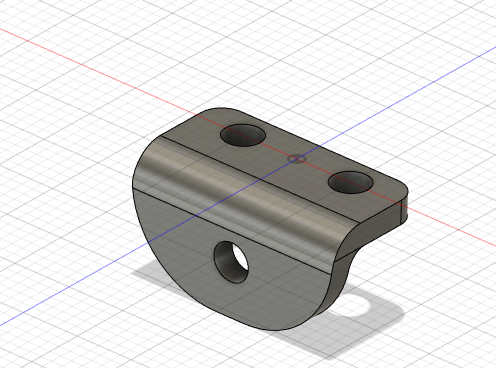
サーボモータマウントの作成
あまり難しいことはありませんので、下記の図を参考に作ってみてください。
ファイル名はservo-mount-1としています。板の厚みは3㎜です。
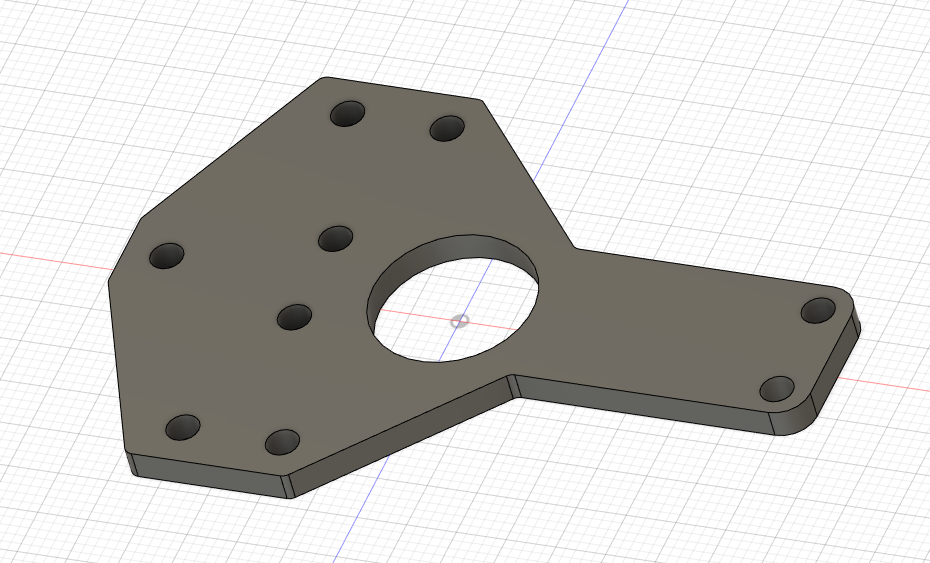
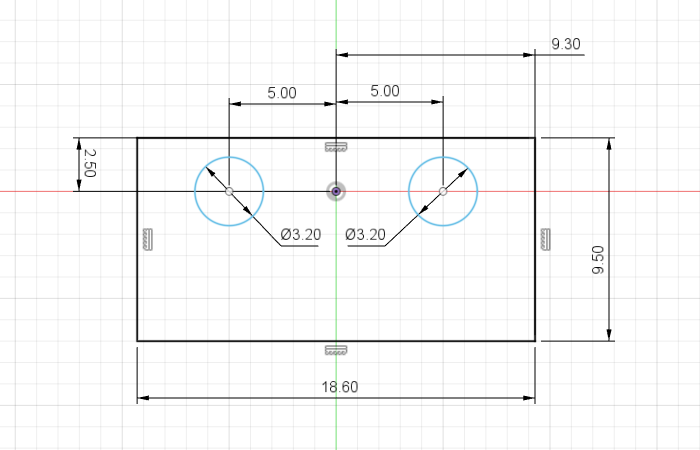
穴位置です。
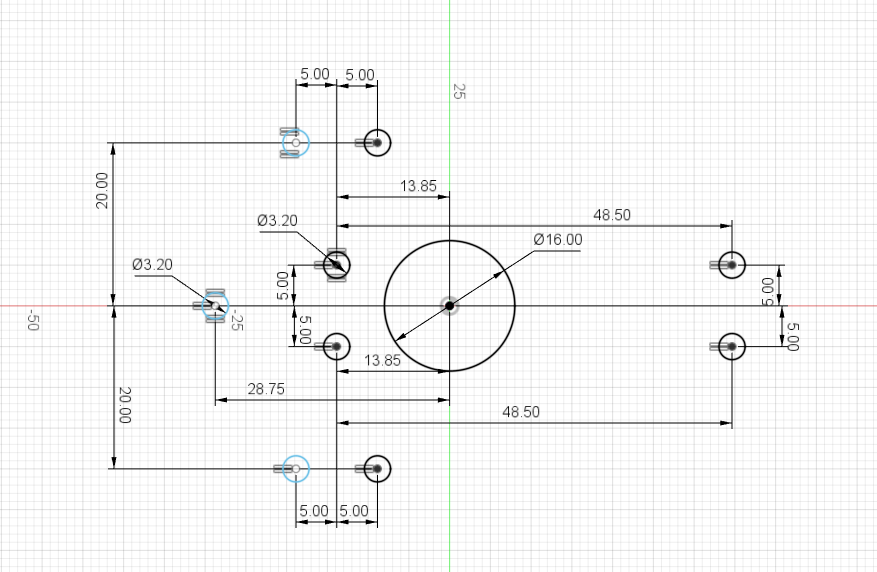
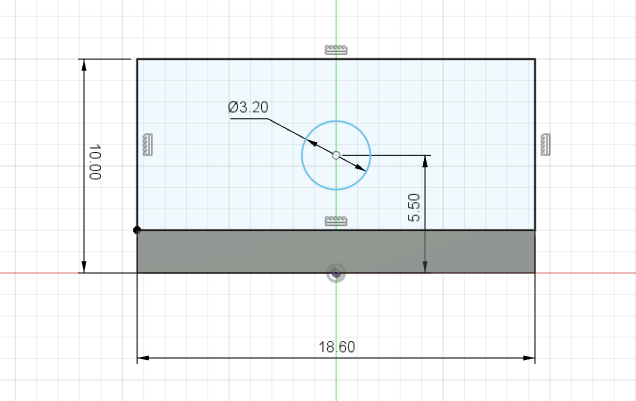
外周の寸法です。
アームマウントの作成
アーム自体を固定する為の部品です。ファイル名はarm-mountとしました。
下記の穴位置を参考に作ってください。板の厚みは2㎜でした。
この状態になりますので、図を参考にフィレットで角を丸めてください。
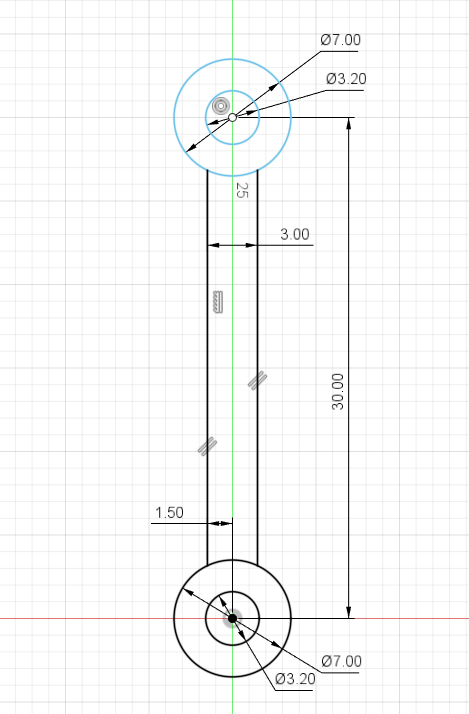
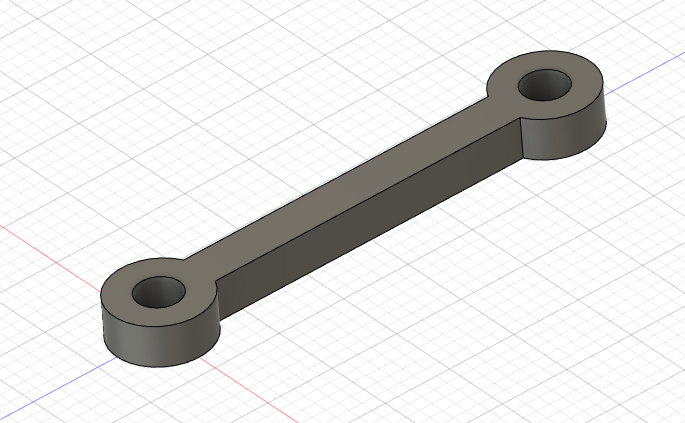
リンクの作成
パーツ名はarm-linkとしました。厚さは3㎜で押し出します。
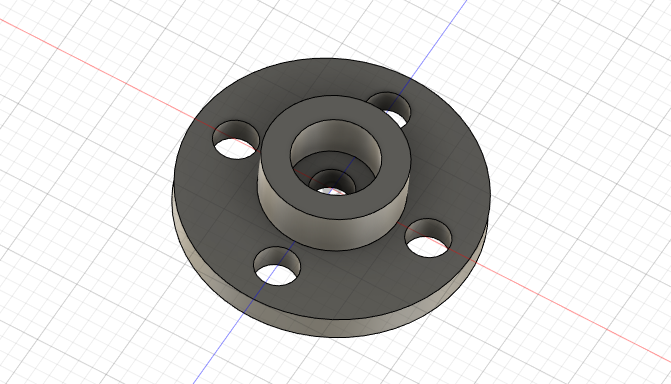
サーボホーンの作成
サーボモータの頭につける部品です。
名前はservo-hornとしています。以下の図を2㎜で押し出します。
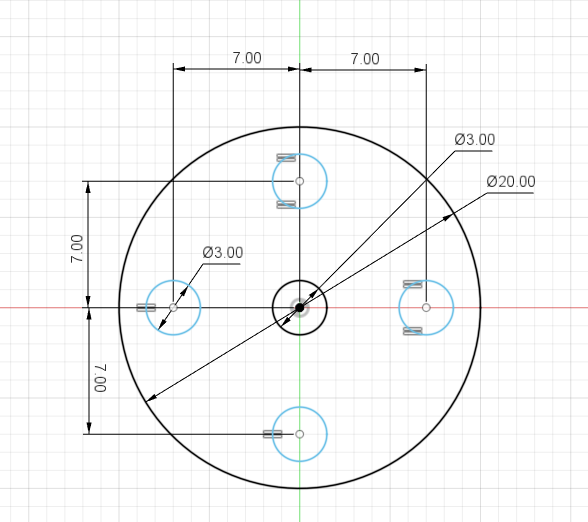
その下に以下の図の様にドーナツ状に3.5㎜押し出します。
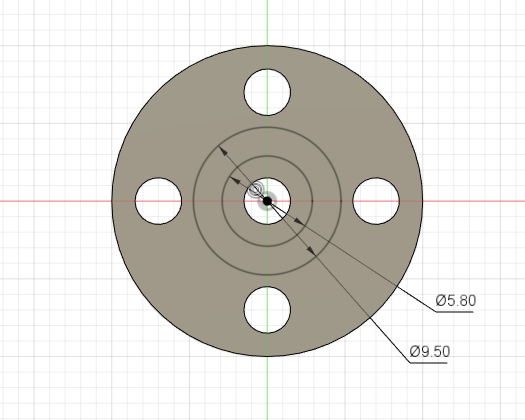
完成です。
スペーサーの作成
内径3.2㎜、外形5.8㎜のスペーサーを作ります。
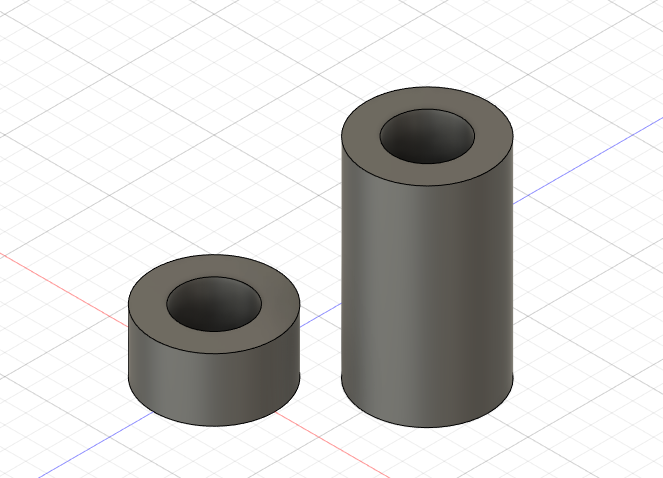
高さが3㎜のものと10㎜の物を作ります。それぞれ名前はspacer-3㎜,spacer-10㎜としました。
お疲れ様です。
これで一通り、ロボットアームを構成する備品を作ることが出来ました。
次回はアセンブリをしていきます。ネジやナット、サーボモータはネット上のデータを流用する事が出来ますのでご安心下さい。
Follow me!