
今回は前回作成したモデルを使って、アセンブリを行っていきます。
前回はこちらです。

アセンブリは、複数の部品やコンポーネントを組み合わせて一つの大きな機械や製品を構築するプロセスを指します。このプロセスにおいては、個々の部品の設計だけでなく、それらがどのように互いに結合し、動作するかが重要です。
アセンブリの特徴は以下の通りです:
- 複数の部品の統合:アセンブリでは、多くの異なる部品が一つの大きなシステムに統合されます。これにより、各部品の相互作用や全体としての機能を理解できます。
- 動きや関係のシミュレーション:Fusion 360のようなソフトウェアでは、部品間の動きや相互作用をシミュレートし、実際の動作を視覚化できます。
- 効率的な設計変更:アセンブリ内の一部を変更すると、その影響が他の部分にどのように及ぶかを即座に確認できます。これにより、設計の最適化が容易になります。
- エラーの早期発見:部品を組み合わせることで、設計上の問題や干渉などのエラーを早期に発見し、修正することが可能です。
アセンブリは、特に複雑な機械や製品を設計する際に重要な役割を果たし、設計の精度と効率を大幅に向上させることができます。

ファイルのインポート
前回までで、モーターマウントとそれを固定するベース部品のモデリングを行いました。
加えてDCモータとホイールを読み込みます。
今回はネットで公開している3Dデータを読み込んでみます。

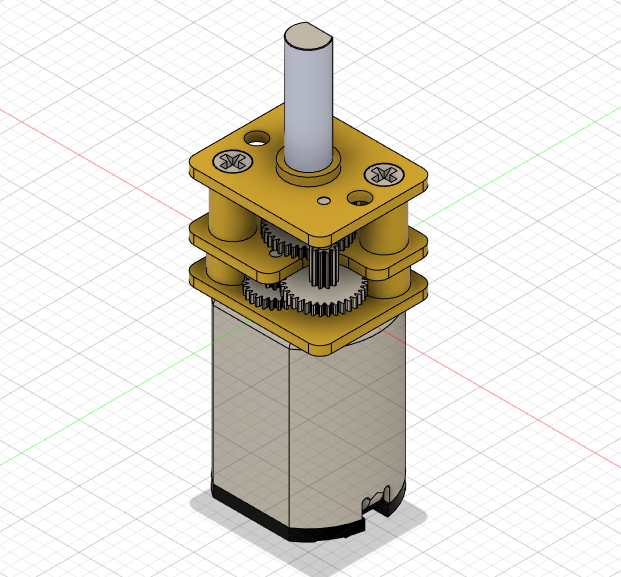
Polol 50:1 Micro Metal Gearmotor HPCB 6V のホームページ上にモーター3Dモデルが公開されています。
https://www.pololu.com/product/3063/resources
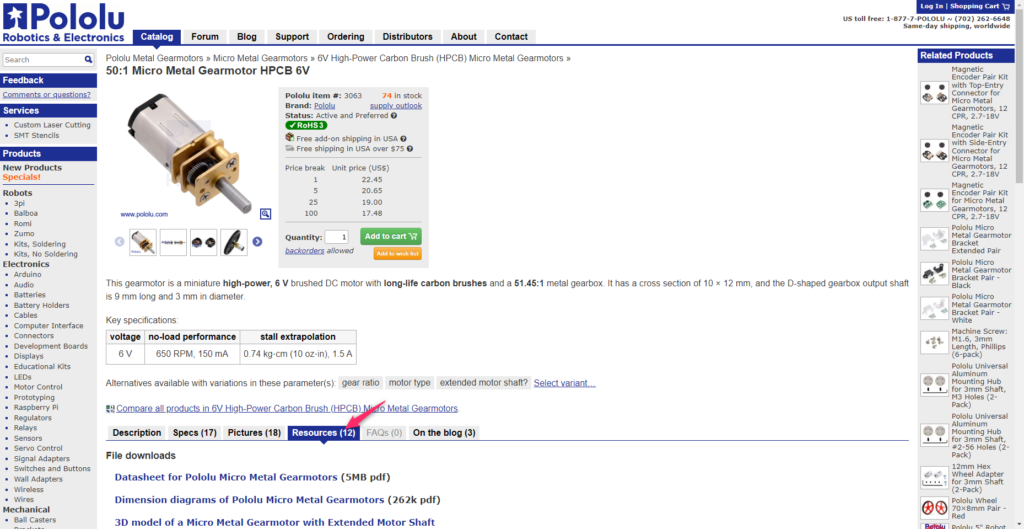
Resourcesにある、3D model of Micro Metal Gearmotors (single-shaft, precious metal brushes, not 1000:1) をクリックします。

micro-metal-gearmotor-standard.stepというファイルがダウンロードされます。
stepファイルは様々なCADソフトで読み込むことが出来る3Dデータです。分かりやすい場所に移動しておいてください。
続いてホイールです。

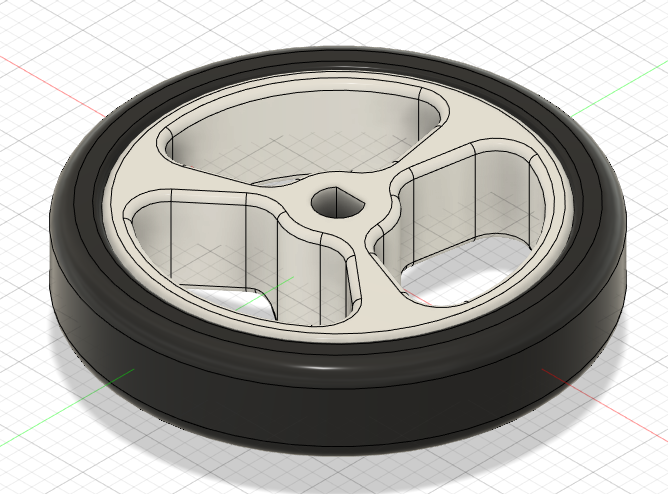
同じくPoloruのホームページで公開されています。
前回までで自分でモデルを作っている方はそちらを使って貰って構いません。
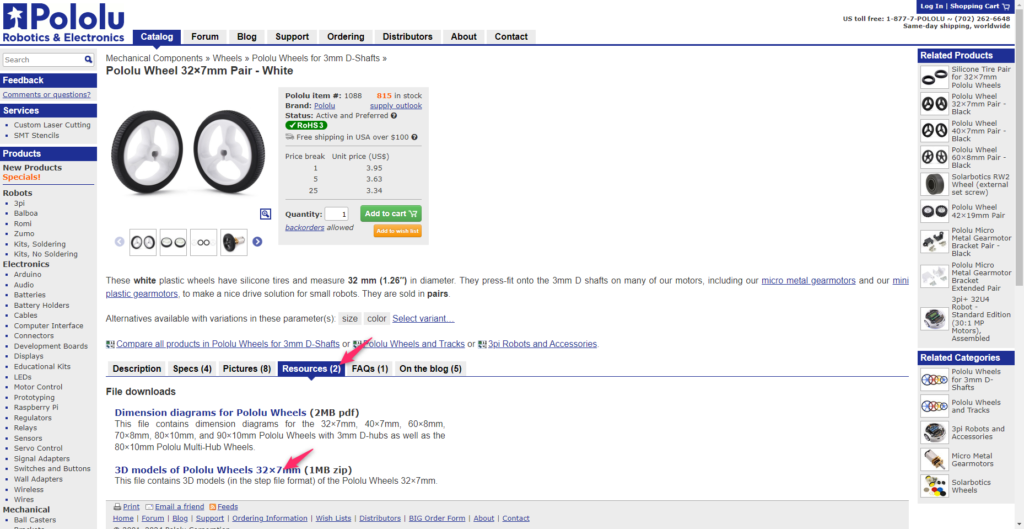
https://www.pololu.com/product/1088
Resorcesの3D models of Pololu Wheels 32×7mmをクリックします。
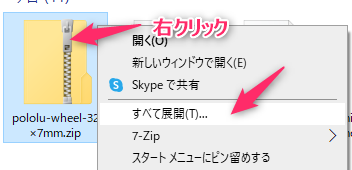
ダウンロードされたZIPファイルを右クリックし、すべて展開をクリックします。
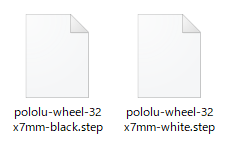
白色と黒色のホイールがありますのでお好きな方をお使いください。こちらもファイルを分かりやすい場所に移動してください。
ここからFusion360での作業です。
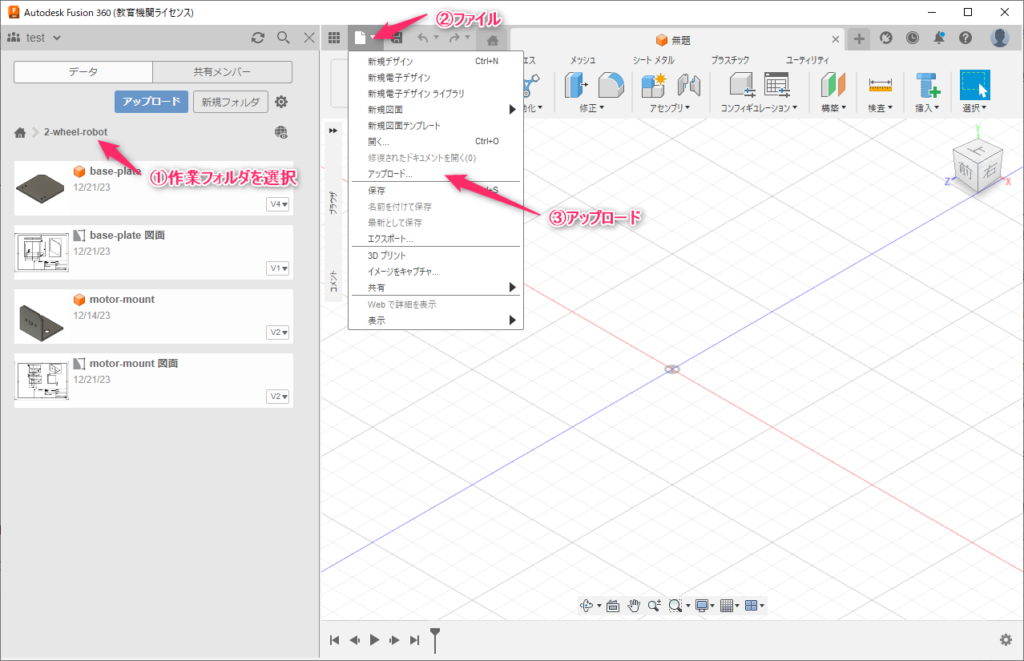
データパネルから前回までで作業した部品と図面があるフォルダに移動しておきます。
この状態で、ファイル>アップロードをクリックします。
取り込みたいファイルをドラッグ&ドロップで追加し、アップロードをクリックします。
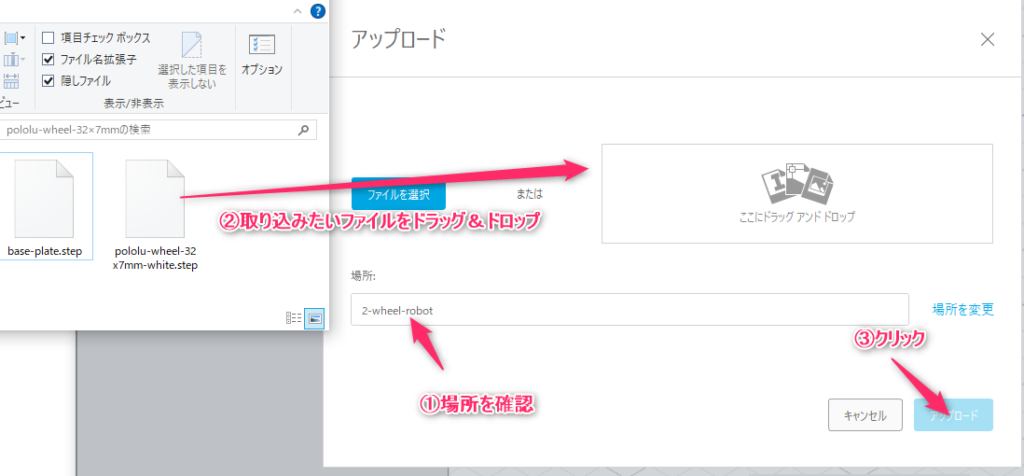
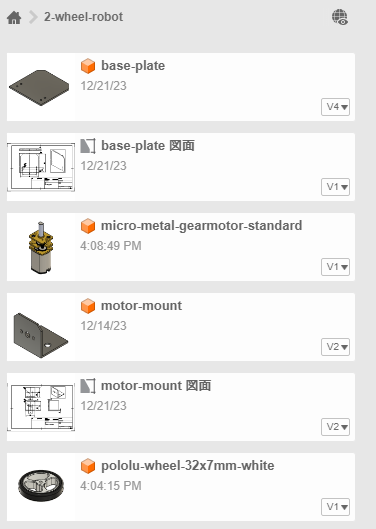
少し待つと、部品がリストに追加されます。
部品の配置
それでは組み立てを行っていきます。
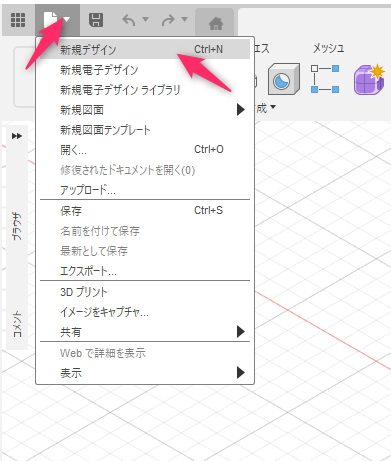
ファイル>新規デザインをクリックします。
組み立てを行う部品の名前を付けます。今回は全体の組み立てという意味でAll-asmとしておきます。
保存をクリック。
部品の中から最初に配置する部品をドラッグ&ドロップで配置できます。
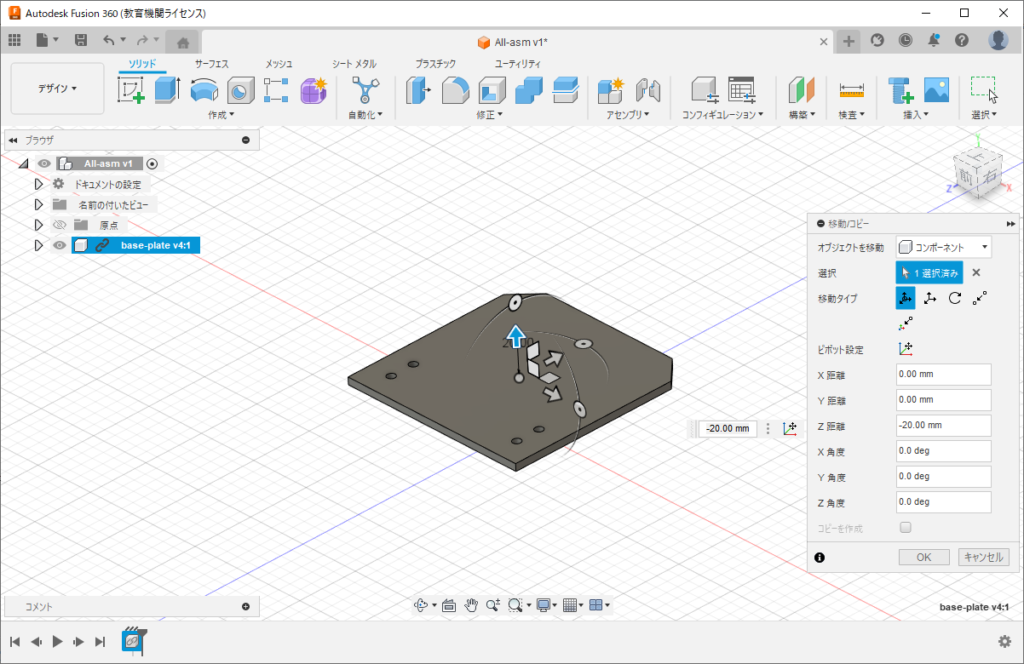
部品は表示されるマークをドラッグ&ドロップする事で、配置する角度と場所を調整できます。
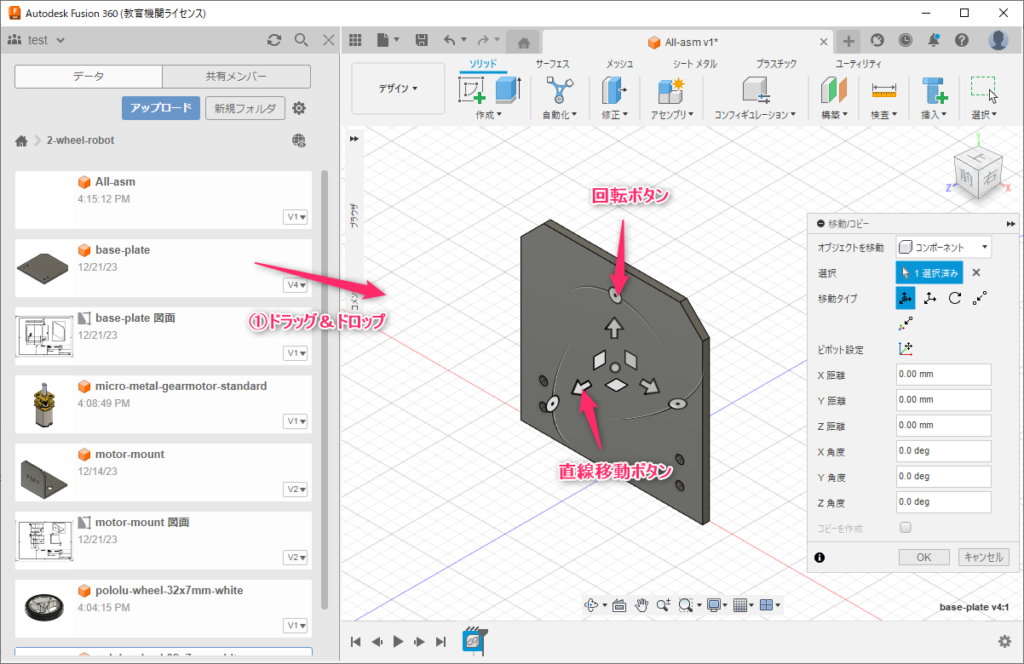
ベースプレートが図の向きになるように移動と回転をしてみてください。
以下操作方法のアニメーションです。

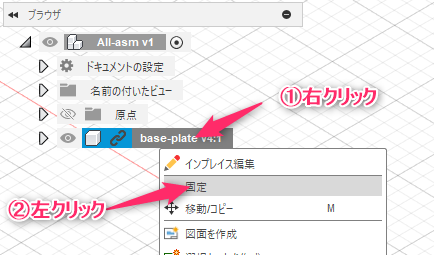
今回はこのベースプレートに対して様々な部品を固定してゆきますので、
ベースプレートを空間に固定しておく必要が有ります。
ブラウザの部品を右クリックし、固定をクリックします。
ジョイントでの結合
ベースが固定出来たらここに様々な部品をくっつけていきます。
部品同士の結合はジョイント機能を使います。
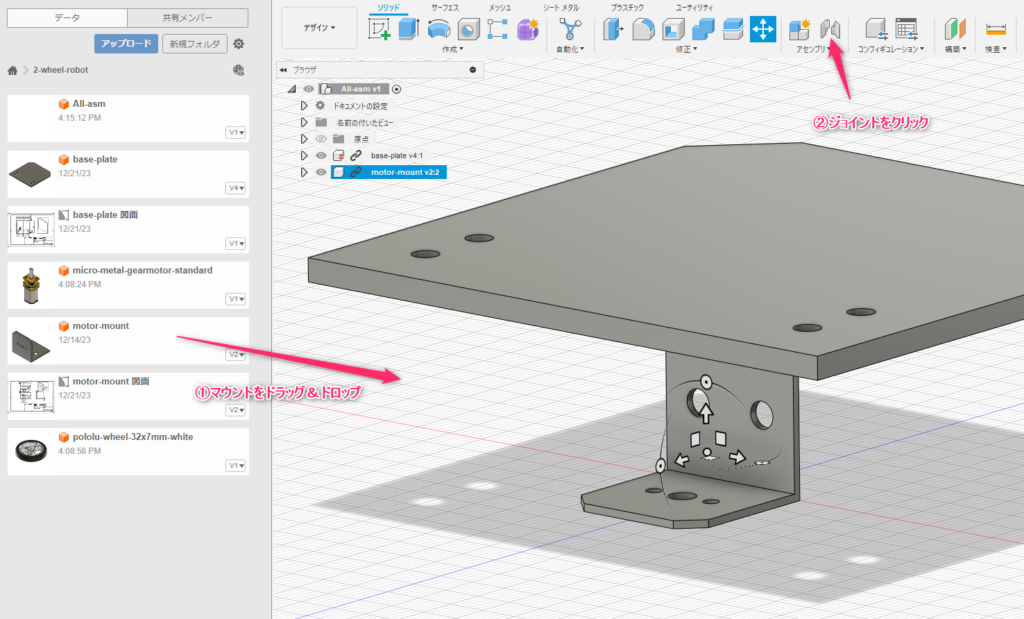
配置する部品(モーターマウント)を画面内にドラッグ&ドロップし、ジョイントをクリックします。
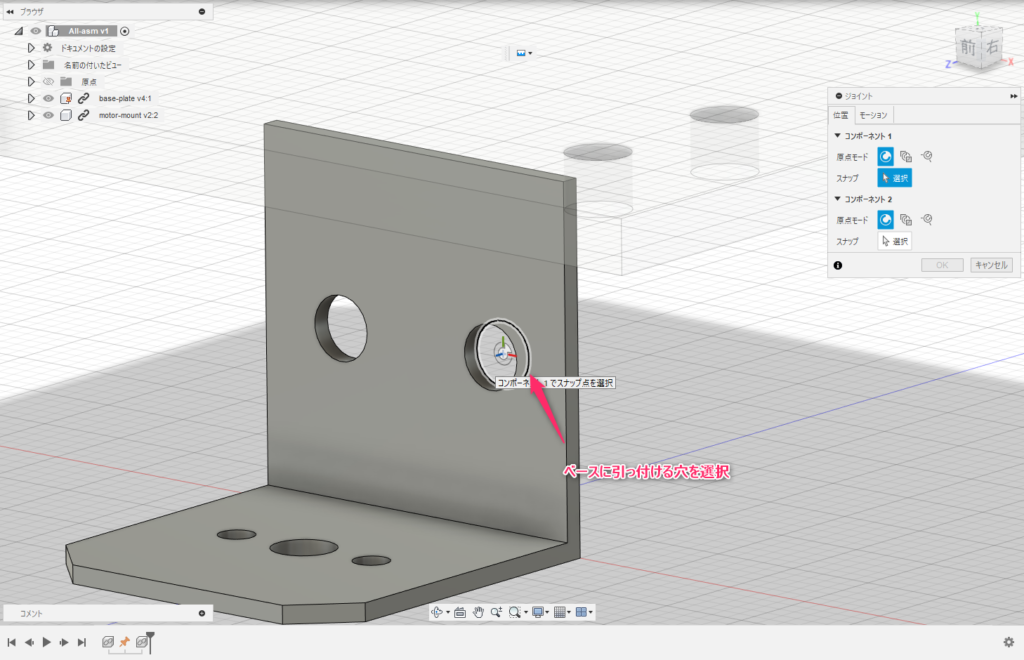
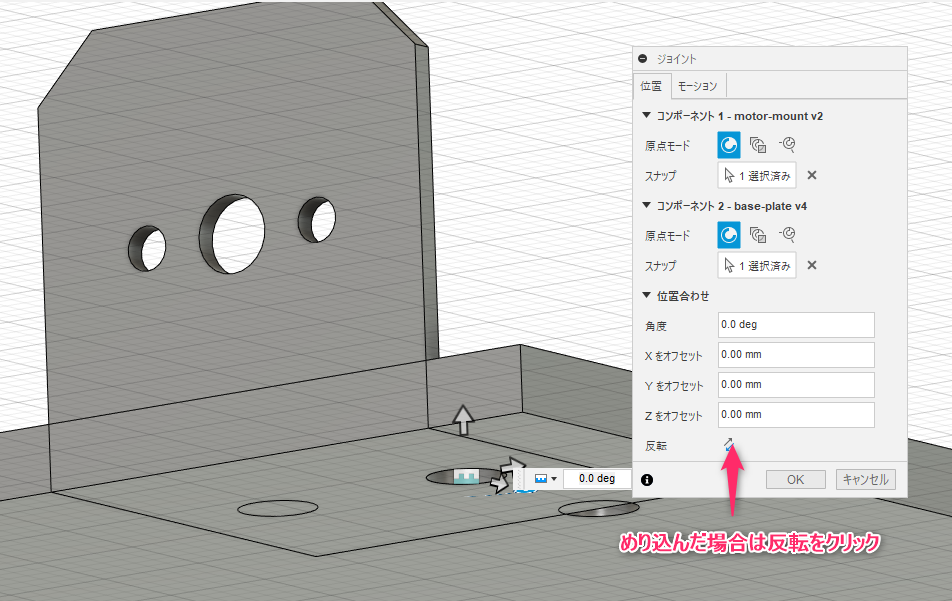
今回はネジ穴同士を合わせて結合させます。モーターマウントの穴をクリック。
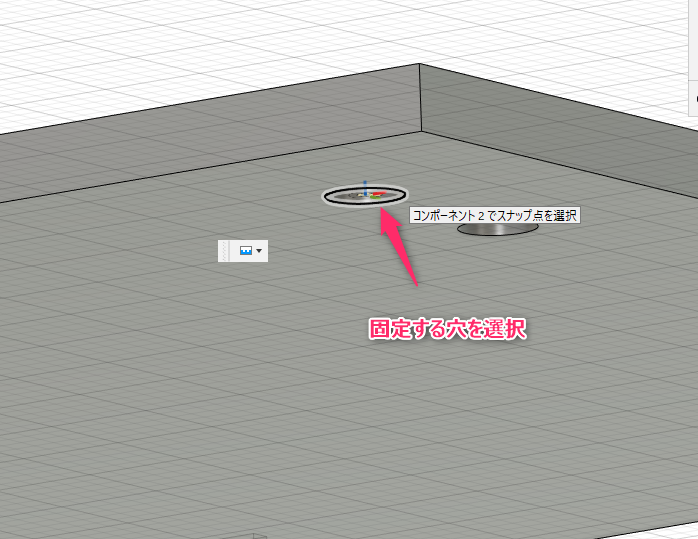
続いてベースプレートの穴をクリック。
部品がめり込んだ場合は反転をクリック。
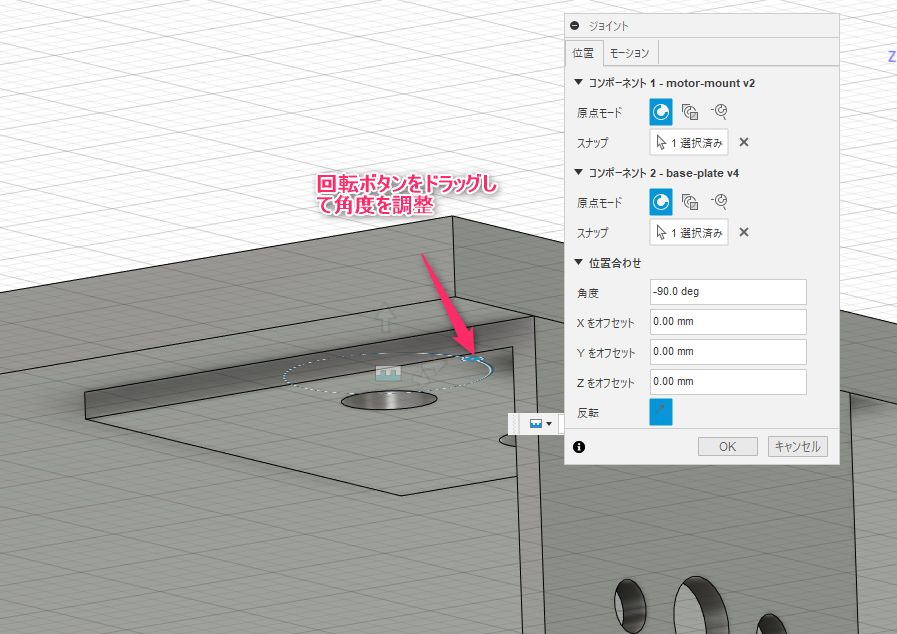
回転ボタンをドラッグすると角度を調整できます。今回は90度動かせばぴったりです。
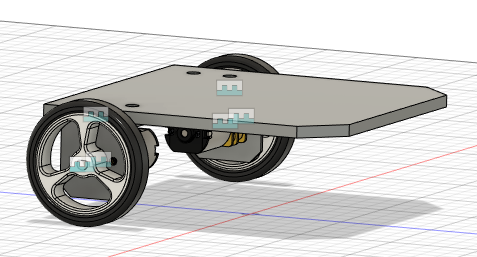
同様にして反対側のモータマウントとモーター、ホイールを配置、ジョイント固定で操作を練習してみてください。
操作アニメーションは以下の通りです。

完成!
課題
このロボットは前方にフリー回転のキャスターを付ける事で車体を引きずることなく進むことが出来ます。
下記の図のようなキャスターを参考にロボットに合うキャスターを設計、アセンブリし、ロボット全体の外観図を提出してください。
https://www.monotaro.com/p/6114/8913/

https://www.monotaro.com/p/5892/0452/

Follow me!