
前回はモータの概要について学びました

今回はモータの回転数を計測する方法について学んでゆきます。

角度センサ
角度センサには主に以下の2種類があります:
- ポテンショメータ (Potentiometer)
- エンコーダ (Encoder)
ポテンショメータ
ポテンショメータは、抵抗値の変化を利用して回転角度を計測するセンサです。これは可変抵抗の一種で、回転角度の検出に抵抗値の変化を利用しています。
ポテンショメータの原理
巻線式のポテンショメータでは、抵抗板上にブラシが接触することで抵抗値が変化します。
- 構造:ポテンショメータには三つの端子があります。
- 供給電源端子 (VDD)
- 接地端子 (GND)
- 出力端子 (Vout)
- 動作:供給電源端子 (VDD) と接地端子 (GND) に電源を接続し、残りの一つの端子が出力端子 (Vout) となります。この出力端子から基準電位との電位差を計測します。軸が回転すると、可動ブラシの位置によって出力端子と基準電位との間の電位差が変化し、これによって回転角度を検出することができます。

https://akizukidenshi.com/catalog/g/g118292/
ポテンショメータの出力はアナログ信号となります。
ポテンショメータは抵抗値の変化を利用して回転角度を計測するセンサですが、構造上、回転数が限られてしまいます。一定の回転角度範囲内でのみ使用可能で、無限回転はできません。
ロータリーエンコーダ
エンコーダは、パルス信号の組み合わせを利用して回転角度を計測するセンサです。
ロータリエンコーダは無限回転の角度を取り扱うことができます。例えば、モータでロボットの関節角度を制御する場合、ギアなどで減速しているため、モータは何回転もすることが多いです。このため、モータの角度センサとしてはロータリエンコーダがよく使われます。
エンコーダの原理
エンコーダは、回転する部品に付けられたパターンを読み取り、そのパターンに基づいてパルス信号を生成します。これにより、回転角度や位置を精密に計測することができます。
エンコーダの出力はディジタル信号となります。
ロータリエンコーダの仕組み
ロータリエンコーダの動作原理を説明します:
- 発光ダイオードとフォトトランジスタの間にスリット円盤が回転します。
- スリット円盤の回転により、発光ダイオードの光がフォトトランジスタに届いたり遮断されたりします。
- この遮断と透過の繰り返しが、増幅されたパルス信号として出力されます。
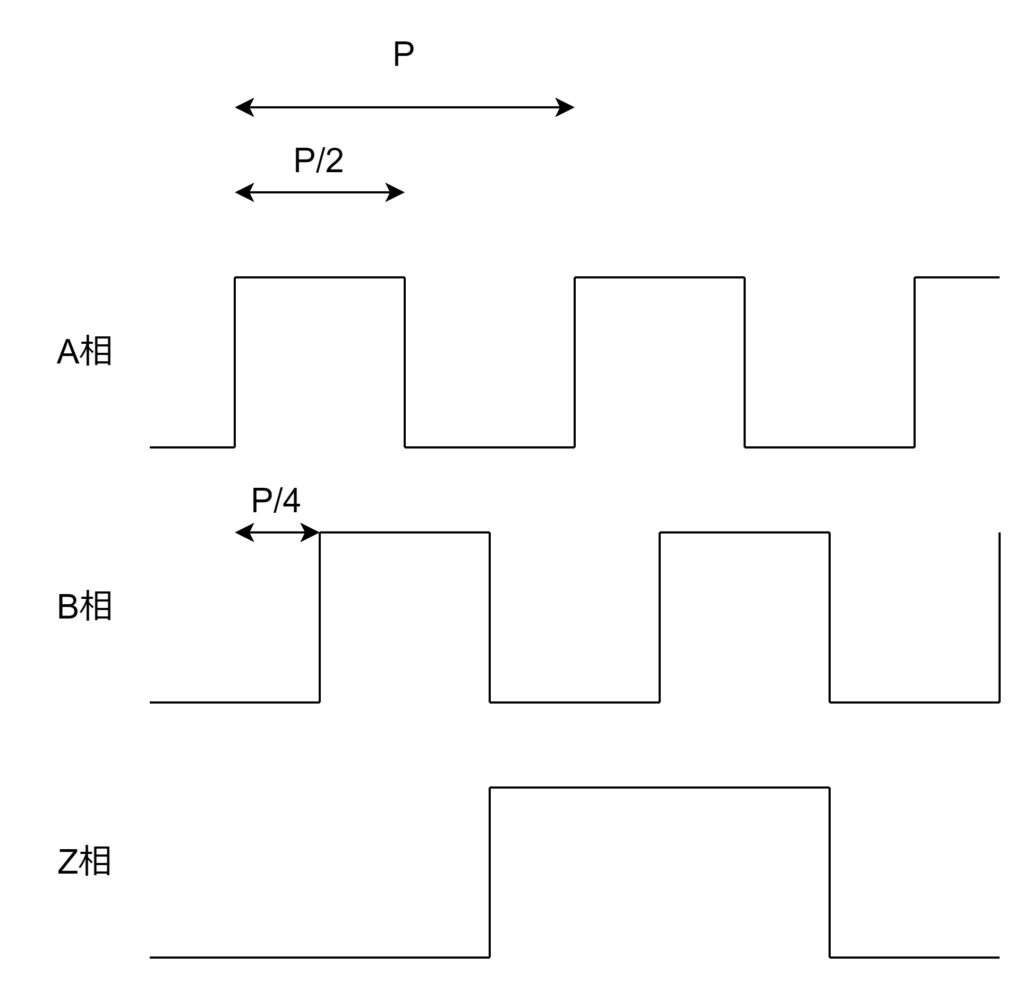
パルス信号の位相ずれ
固定スリットによって、2組のパルス信号の位相がずれるようになっています。この2組のパルス信号はそれぞれA相、B相と呼ばれます。A相とB相のパルス信号の時系列波形は1/4ピッチずれた波形となります。
回転角度と回転方向の測定
- 回転角度:パルス信号をカウントすることで、回転角度を測定します。
- 回転方向:位相がずれながらHigh状態とLow状態を繰り返す二つのパルス信号(A相とB相)を比較することで、回転方向も検出できます。
回転方向の検出方法
- 時計回り:A相が先にHigh状態となり、B相がそれを追いかけるようにHigh状態になります。続いて、A相がLow状態になり、その後B相もLow状態になります。
- 反時計回り:B相が先にHigh状態となり、A相がそれを追いかけるようにHigh状態になります。続いて、B相がLow状態になり、その後A相もLow状態になります。
Z相の役割
Z相のついたロータリエンコーダでは、1回転するごとにZ相がHigh状態になります。これにより、正確な回転数の測定が可能です。
インクリメンタル方式
インクリメンタル方式のロータリエンコーダは、初期状態からの相対的な回転角度の情報を扱います。そのため、電源を入れた際には原点を合わせる必要があります。
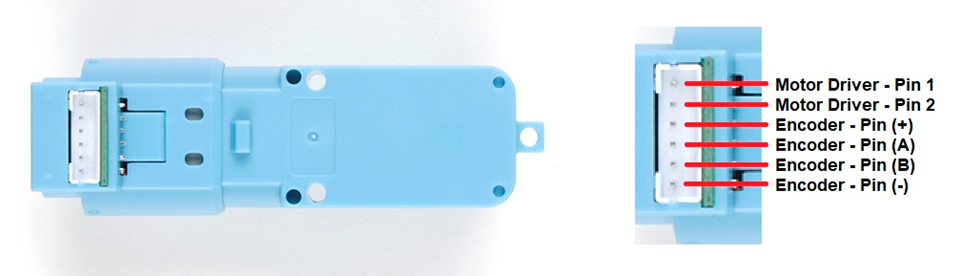
実験に使用するモータ
今回はギアドモータとロータリエンコーダが一体となったエンコーダ付きギアドモータ(DG01D-E)を使用します。
| 動作電圧 | 3V~9V |
| ギア比 | 1:45 |
| 回転数 | 90RPM (4.5V) |
| トルク | 0.8 kg*cm (0.078 Nm) |
| 分解能 | モータ1回転当たり3パルス |

モータ制御 実験①
本実験で使用するモータについて,エンコーダの出力波形の周期Tから、モータの軸先の回転数N[rpm]を求める為の計算式を答えよ。
ヒント:モータは1回転につき3パルス出力される。ギア比が1:45の為,135パルスで軸先は1回転となる。
モータ制御 実験②
エンコーダ付きギアドモータとオシロスコープを使用し,モータの回転数[rpm]を計測せよ。
1.5V~9Vの間で電源電圧を変更し、横軸電圧縦軸回転数のグラフを作成せよ。
次回はこちら
Follow me!