
前回は学習のための環境を構築しました。


なお、Pythonについての基礎は学んでいるものとして進めてゆきます。
この章で学ぶこと
マイコン(マイクロコントローラ)は、小さいコンピュータです。
皆さんがよく思い浮かべるパソコンは映像を出力し、コントロールすることが得意です。
マイコンは電子部品と情報をやりとりすることが得意です。
このマイコンに「電気を出してLEDを光らせて!」と命令すれば、回路に電気が流れ、LEDが光ります。
今回は、Raspberry Pi Pico Wを使って、プログラムでLEDを点滅させる方法を学びます。
- GPIOピンの「出力」とは何かを理解する
- LEDをオン・オフする回路とプログラムの仕組み
- MicroPythonでGPIOピンを制御する方法
while文とtime.sleep()で繰り返し処理を実現する
GPIOとは
Raspberry Pi Pico W のピン(GPIO)には「電気を出す(出力)」機能があります。
GPIOは「General Purpose Input/Output(汎用 入出力)」の略です。
つまり、マイコンが電気の“出し入れ”をできるピンのことです。
- 出力(Output):LEDやモーターなどを動かす
- 入力(Input):スイッチやセンサーなどの情報を受け取る
今回は「出力」を使ってLEDを光らせています。
外部LEDの点灯
ブレッドボードを使い、外部LEDをつないで光らせてみましょう。
ブレッドボードは以下のように内部でつながっています。
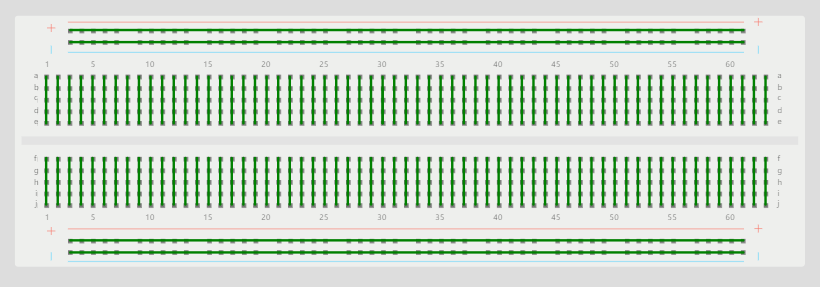
下の図のように電源ラインとGNDラインをあらかじめ引いておくと今後の回路製作が簡単になります。
16番ポートに330Ωの抵抗をつなぎ、さらにLEDをつなぎます。
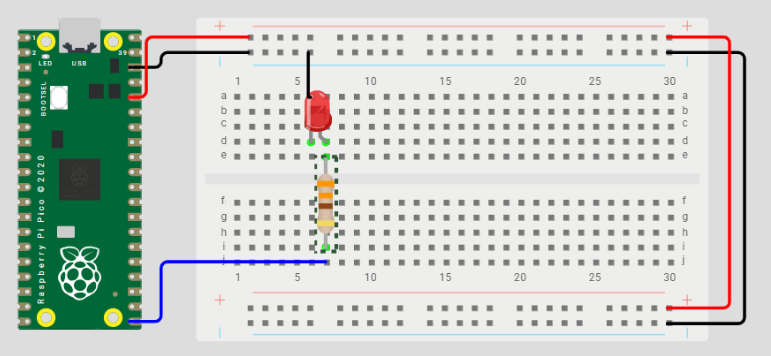
以下のプログラムを書き込み、LEDが1秒間隔で光れば完了です。
from machine import Pin
import time
led = Pin(16, Pin.OUT)
while True:
led.value(1) # 点灯
time.sleep(1)
led.value(0) # 消灯
time.sleep(1)コードの解説:
Pin(16, Pin.OUT):GPIO16を出力モードに設定led.value(1):LEDを点灯led.value(0):LEDを消灯time.sleep(1):1秒待つ
課題1
16番ポートに赤色LEDをつなぎます。
17番ポートに青色LEDをつなぎます。
青色LEDが3秒間点灯し、消灯した後に、赤色LEDが0.5秒点灯、0.5秒消灯を繰り返し続ける回路を作成してください。
解答例はこちら
from machine import Pin
import time
led = Pin(16, Pin.OUT)
led2 = Pin(17, Pin.OUT)
led2.value(1)
time.sleep(3)
led2.value(0)
while True:
led.value(1) # 点灯
time.sleep(0.5)
led.value(0) # 消灯
time.sleep(0.5)課題2
3つのLED(赤・青・黄)を使って、信号機のような動きをする回路を作ってください。
🚦【信号機の動作イメージ】
| LEDの色 | 点灯時間 |
|---|---|
| 赤 | 3秒 |
| 青 | 3秒 |
| 黄 | 1秒 |
次回はこちら

Follow me!