
本サイトでは様々な環境で気軽に本格的なロボット教育を行ってもらうべく、独自のロボット教材を開発しました。
現在、一般販売へ向けて準備をしております。
本Webページではβ版の先行体験をしていただく方向けに公開している資料になっております。
一般の方は販売をお待ちください。
前回はこちらです

1 この章の目的
この章では、PoliviaBot UMEを自分の手で組み立てることを通して、ロボットがどのような技術の積み重ねで作られているのかを体験的に学びます。
単に「部品を取り付ける」だけではなく、
- なぜこの形状なのか
- なぜこの部品配置なのか
- なぜはんだ付けが必要なのか
といった、設計者の視点を意識しながら製作を進めていきます。
この章のゴールは、「組み立てられる」から「設計の意図が読める」へステップアップすることです。
2 PoliviaBot UMEに使われている技術
PoliviaBot UMEは、複数のデジタルものづくり技術が組み合わさって作られています。
| 技術 | 使用ツール | 役割 |
| 電子回路設計 | KiCad | PCB基板の回路図・配線設計 |
| はんだ付け | 手作業 | コネクタ・電子部品の実装 |
| 3D設計 | Fusion 360 | 車輪・フレーム部品のモデリング |
| 3Dプリント | FDM方式 | 樹脂パーツの製作 |
| 組み立て | 工具一式 | 機構として完成させる |
このロボットは、デジタル設計とアナログ作業の両方を体験できる教材として設計されています。
3 全体構造を観察しよう
組み立てを始める前に、まず完成形を観察します。
観察ポイント
- 車輪はどのような形をしているか
- PCB基板にはどのような部品がついているか
- センサやコネクタはどの方向を向いているか
- ネジやスペーサはどの役割を持っているか
ミニ課題
なぜ車輪は単なる円ではなく、リブ(溝)やスポーク構造になっていると思いますか?
考えた理由をノートに記録してください。

4 3Dプリンタ部品の役割と設計思想
PoliviaBot UMEの車輪やフレームの一部は、3Dプリンタによって製作されています。
なぜ3Dプリンタを使うのか
- 複雑な形状を簡単に作れる
- 設計変更がすぐに反映できる
- 軽量化と強度の両立ができる
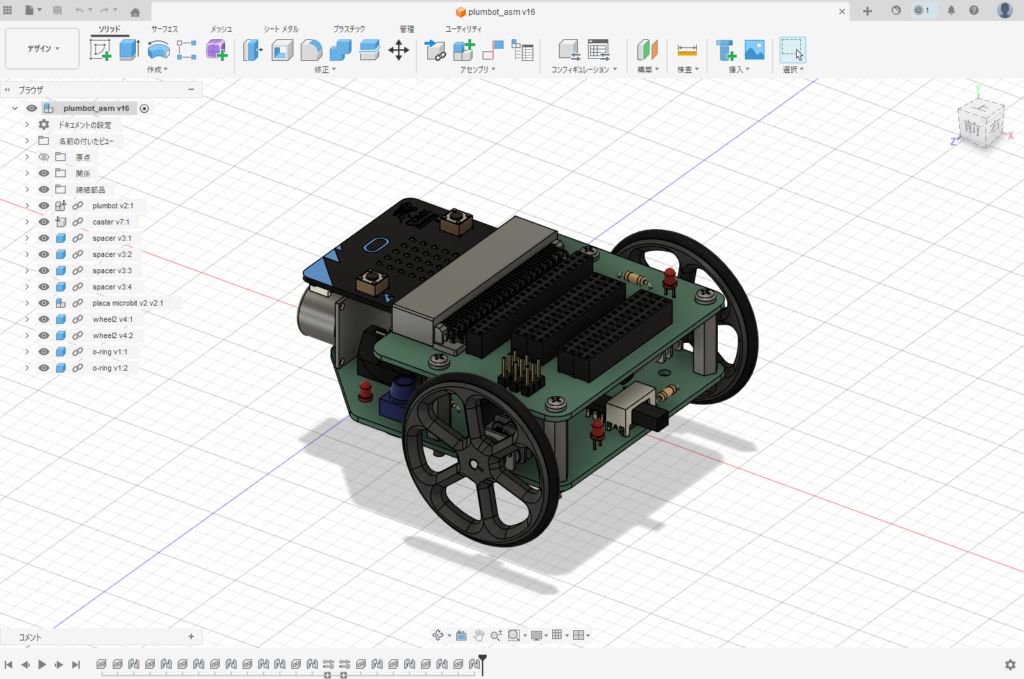
Fusion 360による設計
これらの部品は、3D CADソフト Fusion 360 を使って設計が可能です。
Fusion360については以下の学習コースで詳しく解説しています。
https://sakigake-robo.com/category/mecha/mecha-cad/fusion360/
設計時に考慮されているポイント
- モータ軸とのはめ合い精度
- ネジ穴の強度
- 積層方向と割れにくさ
- 回転バランス
ミニ課題
3Dプリンタは樹脂を少しずつ積み重ねながら形を作ってゆきます。
この積み重ねる方向が変わると、どのような強度の違いが出るか考えてみましょう。
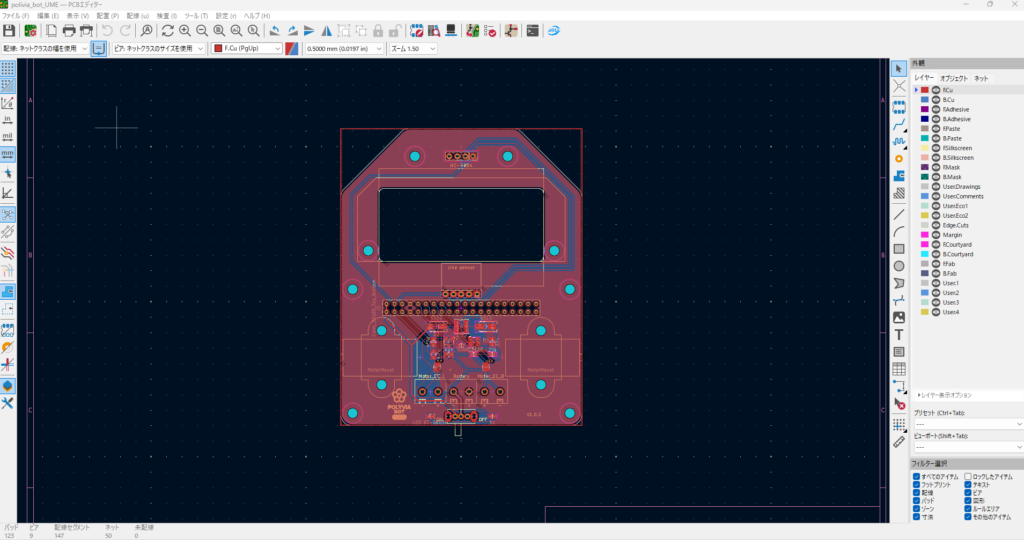
5 PCB基板と回路設計の考え方
PoliviaBot UMEの土台となる基板は、KiCadを使って設計されています。
KiCADについては以下のコースにて紹介しております。
https://sakigake-robo.com/category/circuit/ele-cad/kicad/
PCBの役割
PCB(Printed Circuit Board)は、
- 電気を正しく流す
- 部品を正しい位置に固定する
- ノイズや誤動作を防ぐ
という3つの重要な役割を持っています。
観察ポイント
- 電源ラインは太くなっているか
- モータ周辺の配線はどうなっているか
- GND(グランド)はどのようにつながっているか
ミニ課題
なぜ電源ラインは信号ラインより太く設計されていると思いますか?
6 はんだ付けの基礎と安全
PoliviaBot UMEでは、 コネクタ類や一部電子部品を自分ではんだ付けして完成させます。
はんだ付けの目的
- 電気的に確実につなぐ
- 機械的に外れないよう固定する
使用工具
- はんだごて
- はんだ(鉛フリー推奨)
- ピンセット
- ニッパ
- クリーニングスポンジ
安全上の注意
- はんだごての先端は300℃以上になります
- 作業中は必ずスタンドを使用する
- 換気を行う
- 作業後は手を洗う
7 正しいはんだ付けの手順
- 部品を基板に差し込む(背の低い部品から行うと楽です)
- 裏面からピンを軽く曲げて仮固定
- こて先をパッドとリード線の両方に当てる
- はんだを流し込む
- こてを外す
これを繰り返します。
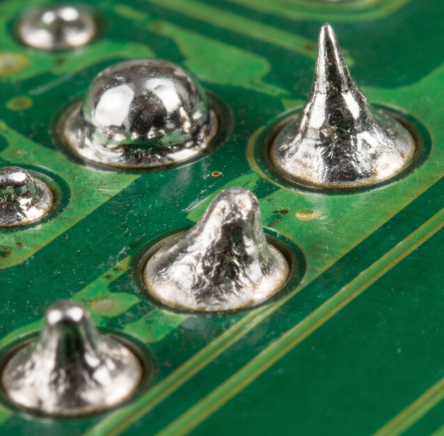
良いはんだの状態
- 表面がなめらか
- 火山型の形状
- ピンとパッドの境界が見える

悪い例
- だま状になっている
- 白く濁っている
- パッドから浮いている
8 組み立て手順(実習)
ステップ1 はんだづけ
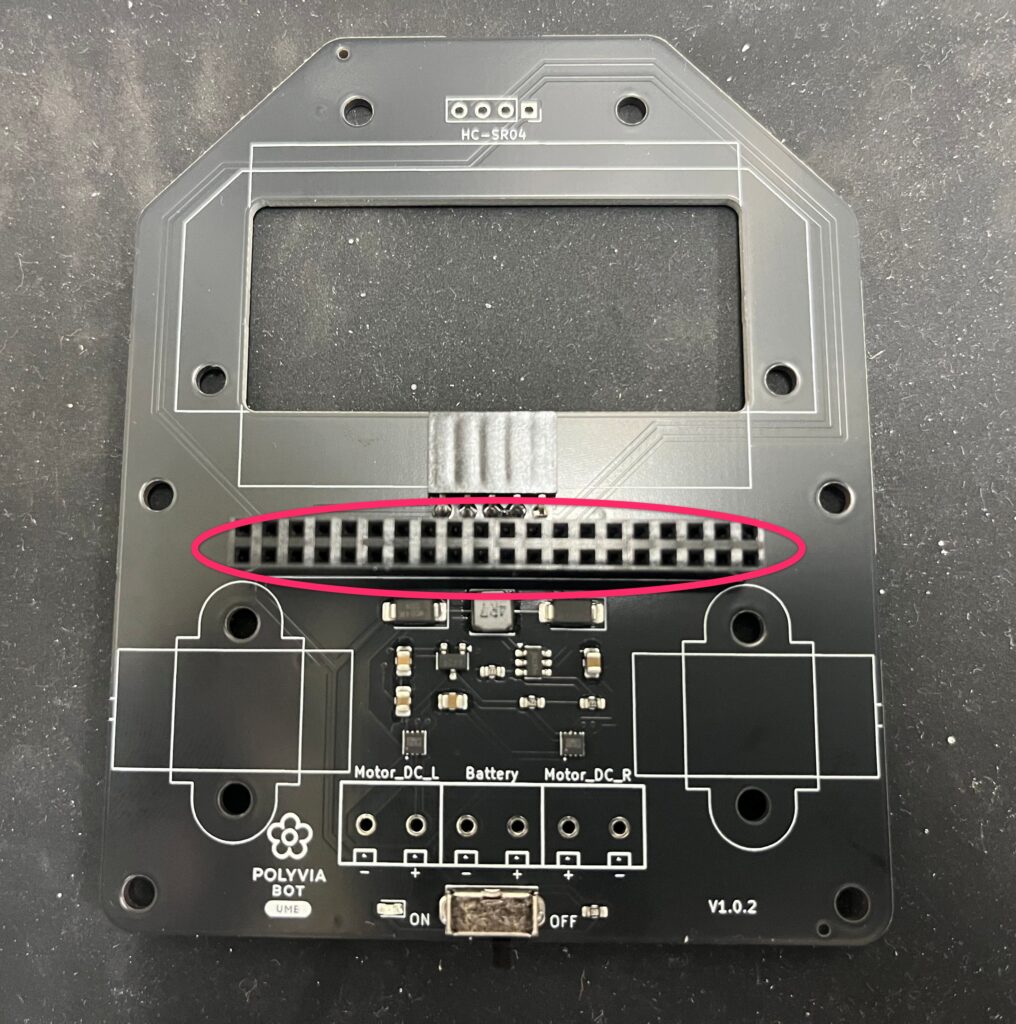
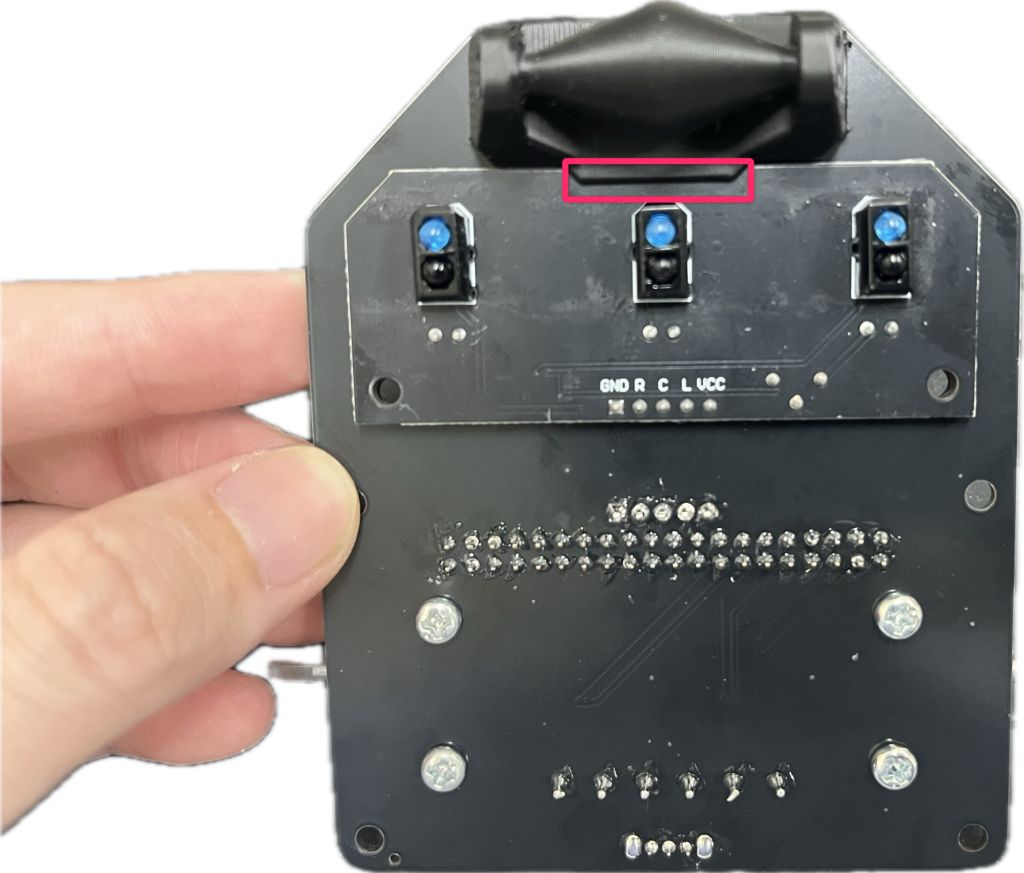
下の図ははんだ付け前の基盤の外観です。
はんだ付けが難しい、小さい部品はすでに実装済みです。
本キットでは、比較的はんだ付けが簡単なコネクタ類のみ実装を行います。

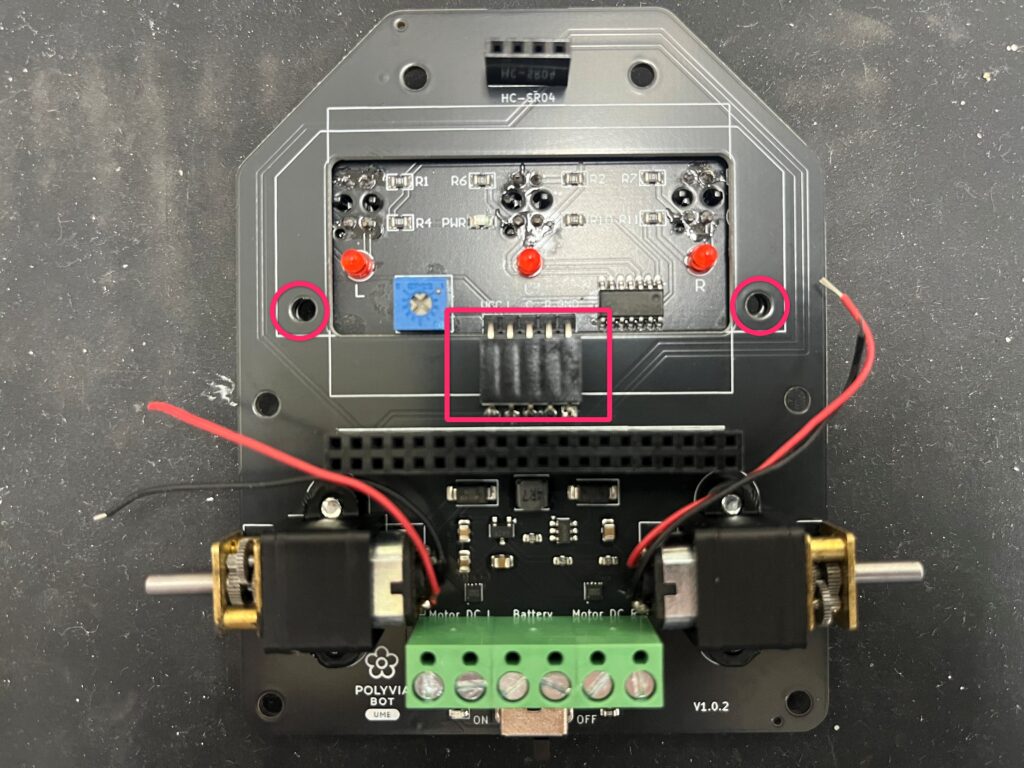
まずは以下のようなロングピンソケットをはんだ付けします。
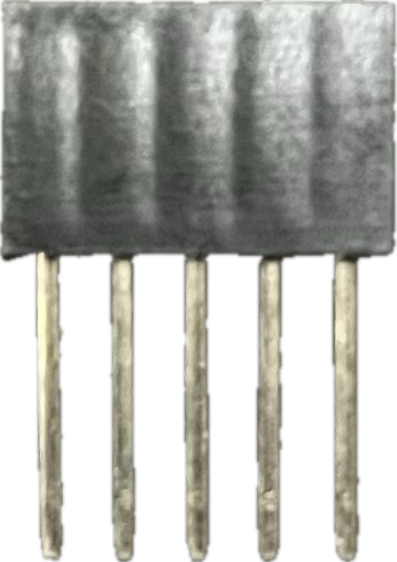
ラジオペンチやピンセットを使い、以下のように90度に曲げます。

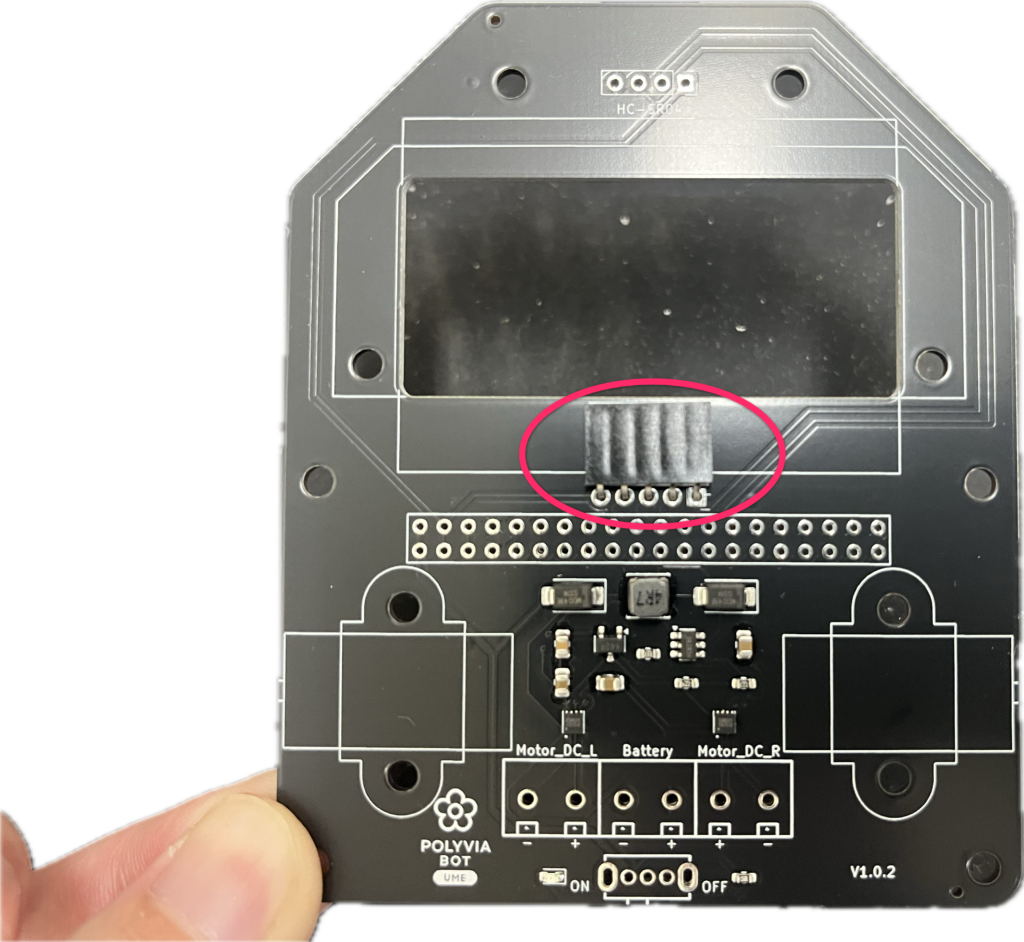
下の赤丸の位置に差し込み、裏面からはんだ付けを行います。
足が長いと思うので、余った足はニッパなどで切り取ります。

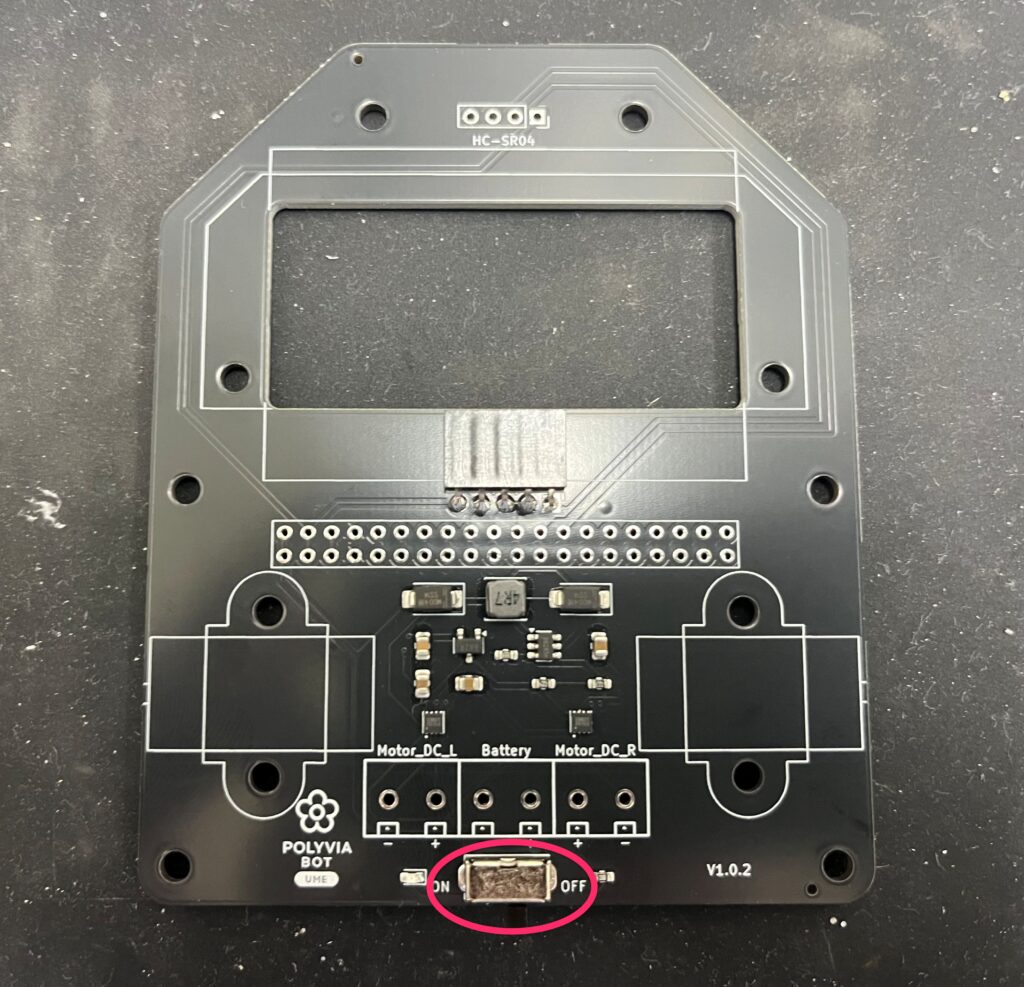
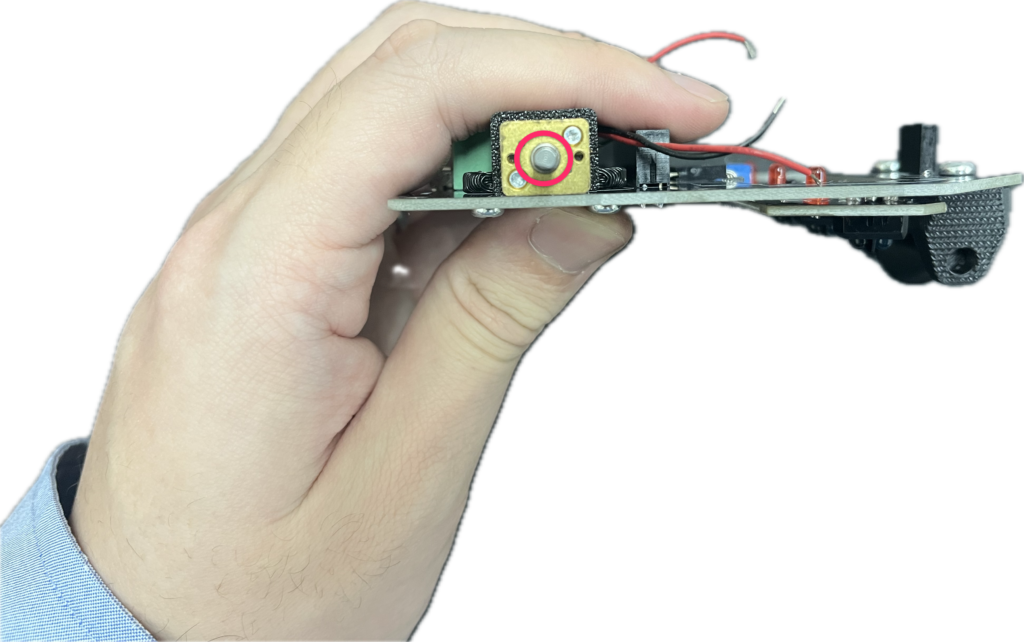
続いてはスイッチの取り付けです。

下の図の赤丸の位置に取り付けます。向きに気を付けてください。

次は2×40のピンソケットを取り付けます。
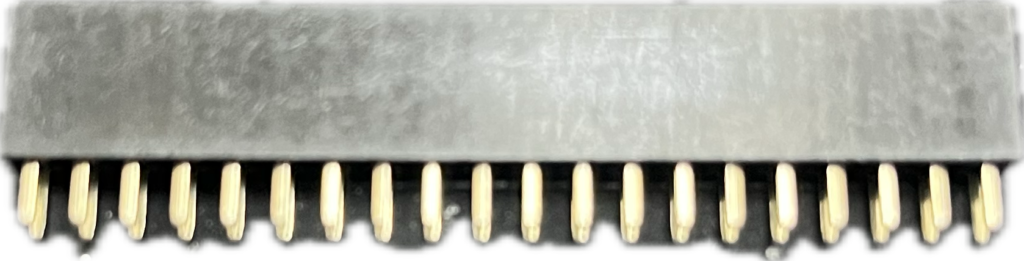
まっすぐ奥まで差し込みます。

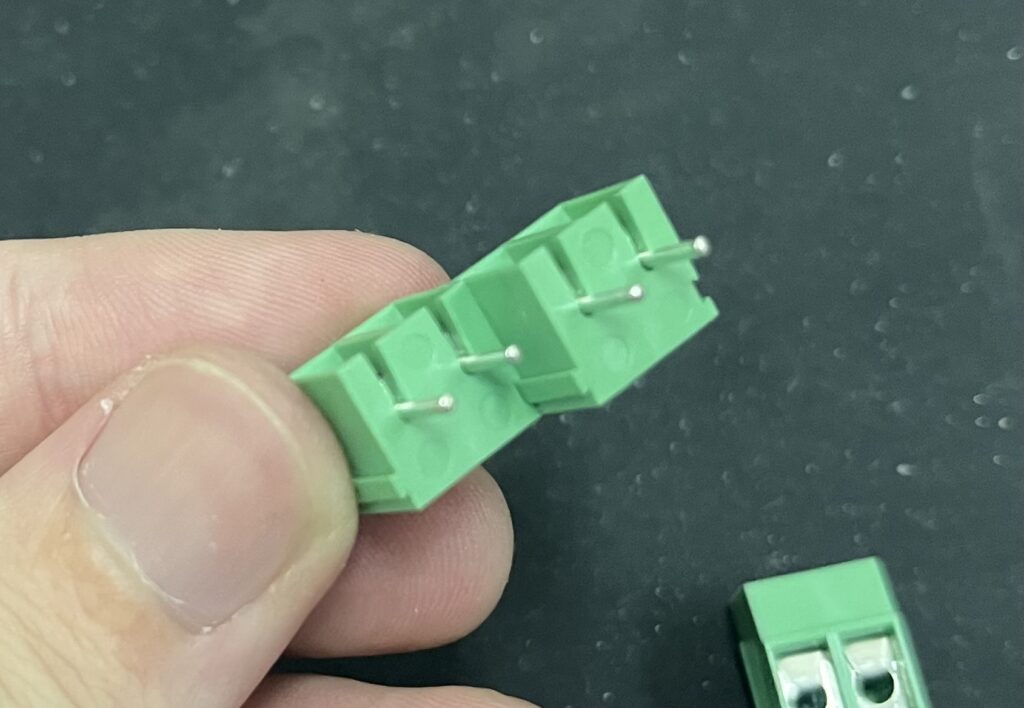
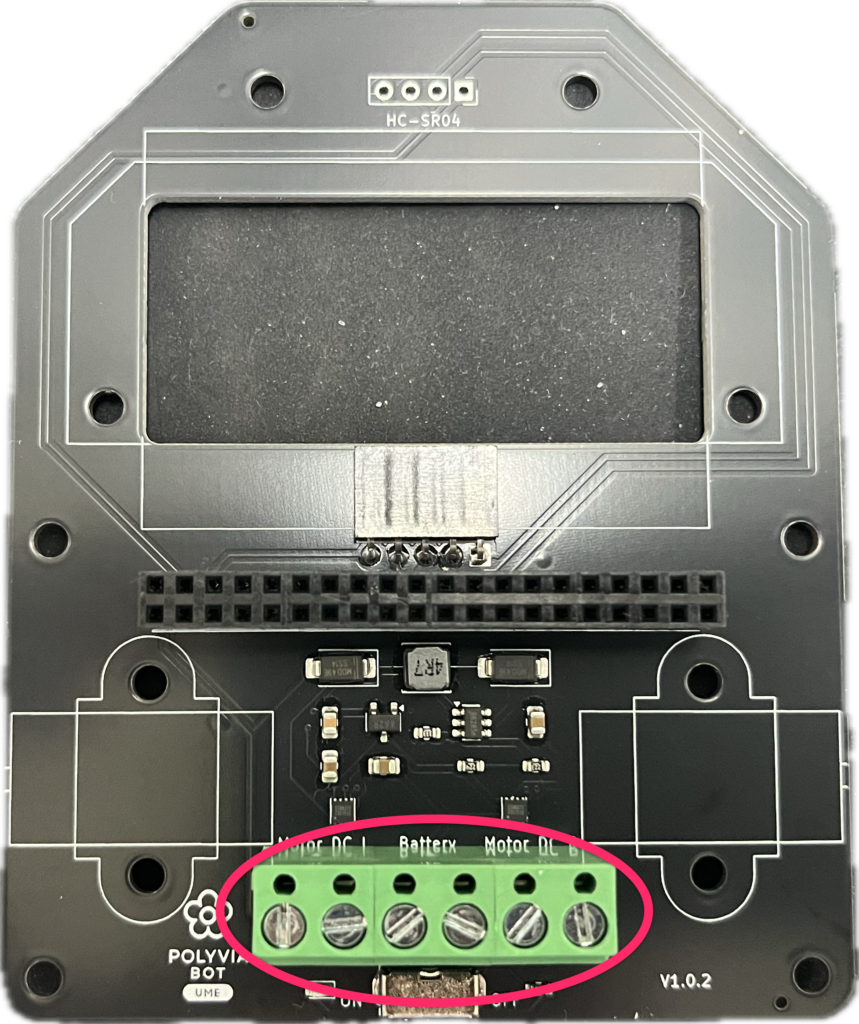
続いてはターミナルを取り付けます。
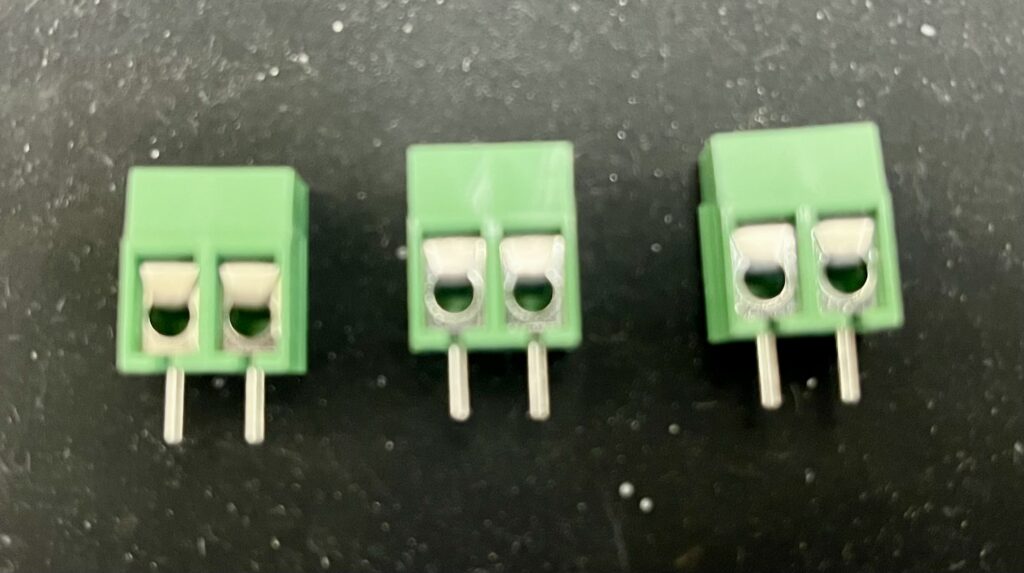
取り付ける前に3つのターミナルを連結します。下の図のように、左右に突起と凹みがついており、差し込むことで連結できます。
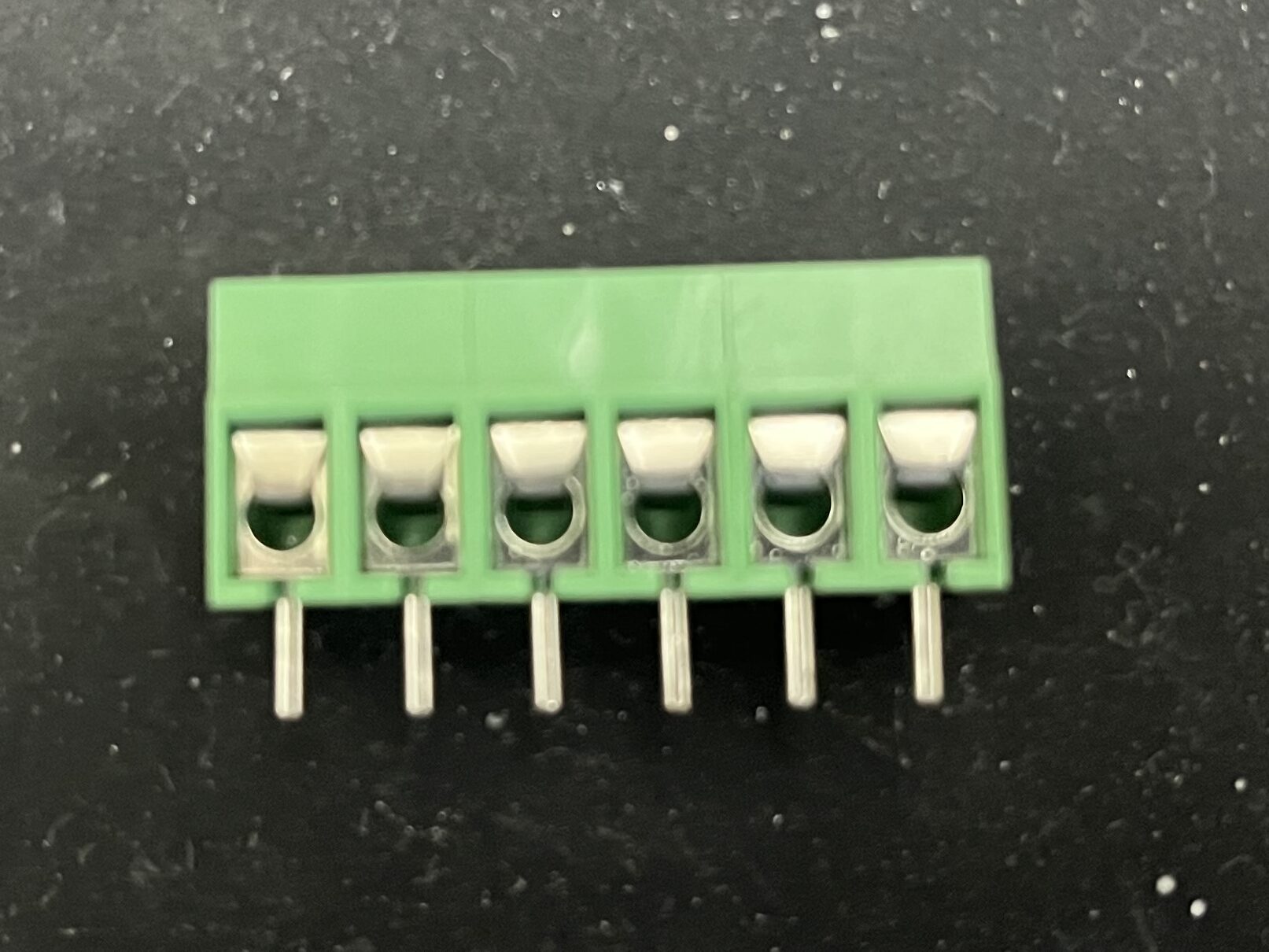
下の図の位置に取り付けます。向きをよく見てください。

最後に4ピンのピンソケットを取り付けます。
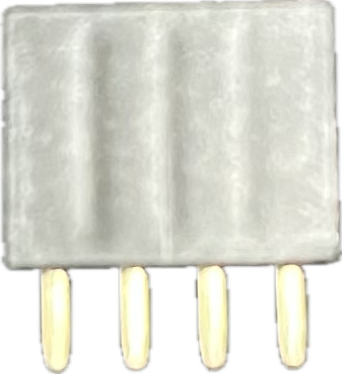
図の位置に取り付けます。


はんだ付けは終了です。
ステップ2 モータ、バッテリー、センサの取り付け
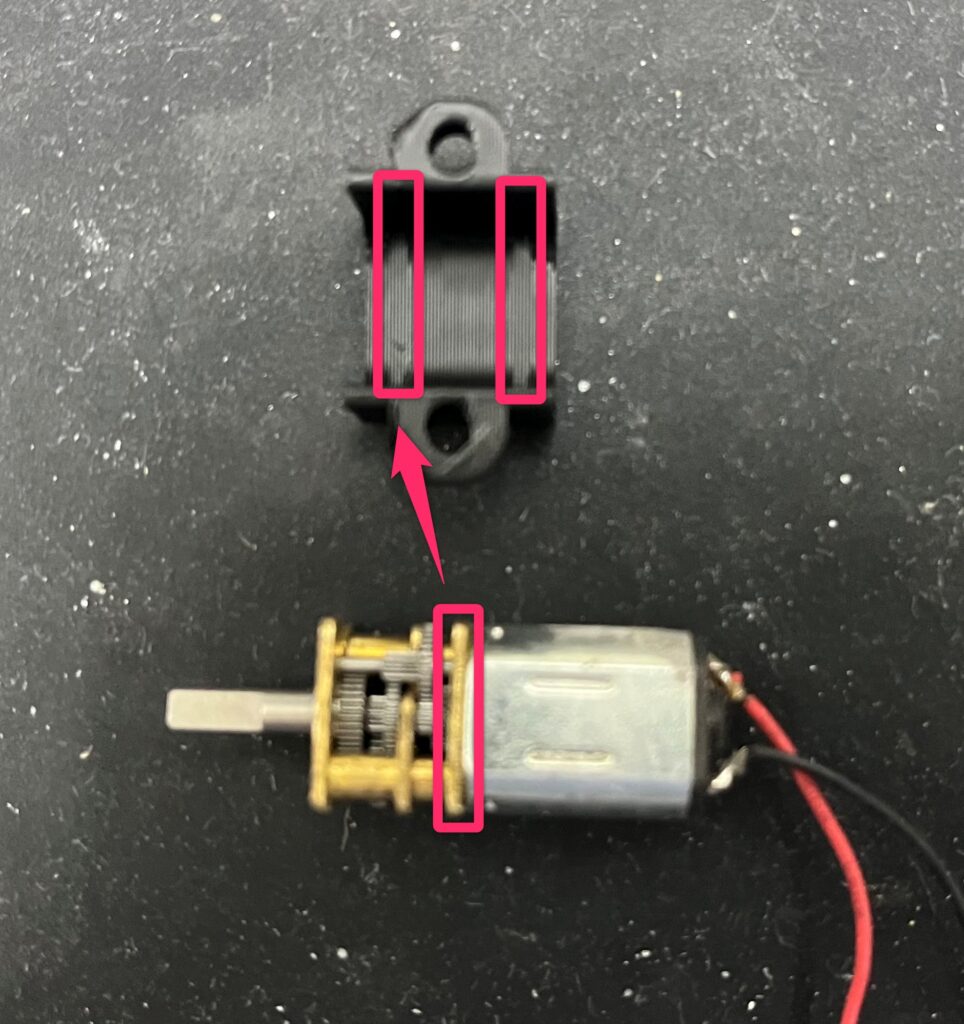
モーターをマウントに固定します。
マウントにはスリットが2か所入っており、スリットがモータのギアボックスの根元にはまるように押し込みます。
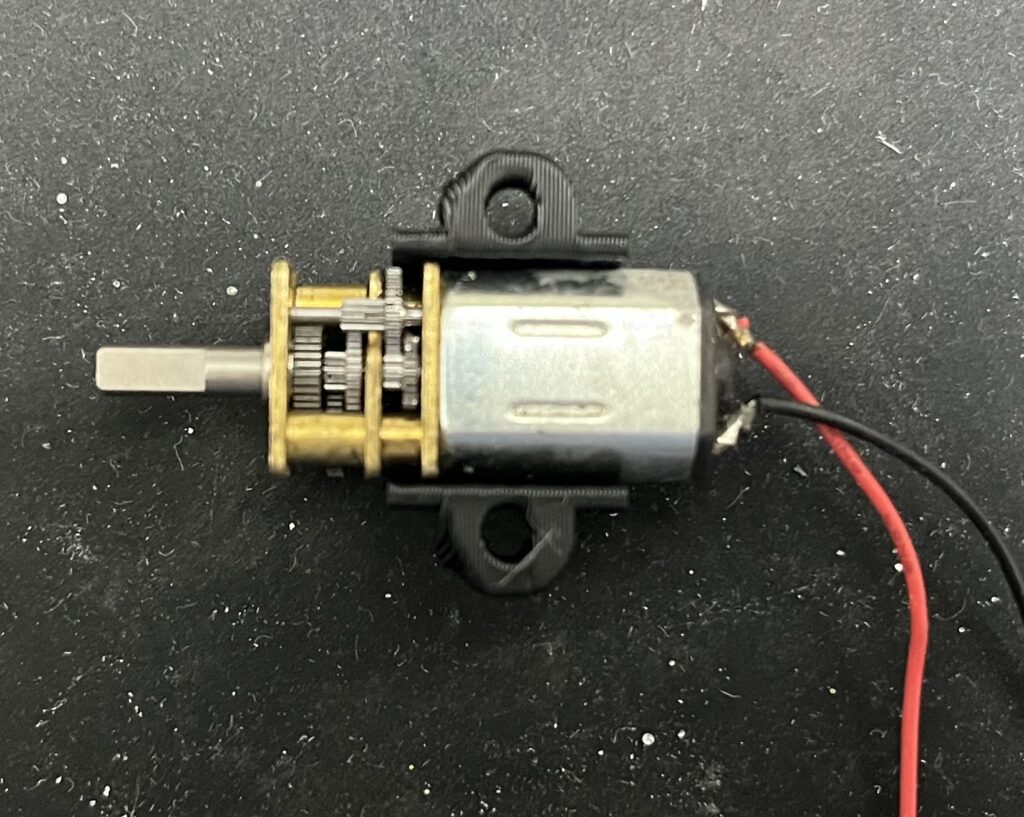
裏からねじ止めを行います。
ねじを回しすぎると部品のねじ穴が壊れてしまいますので、少し硬くなったら手を止めてください。

ラインセンサを取り付けます。
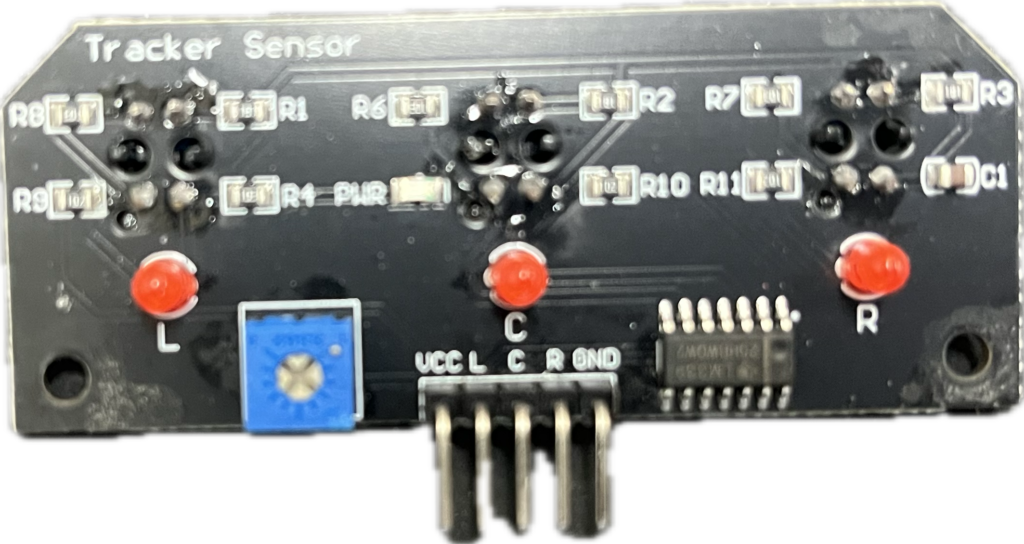
裏面からヘッダーピンに差し込みます。
2つの穴の位置が合うはずです。
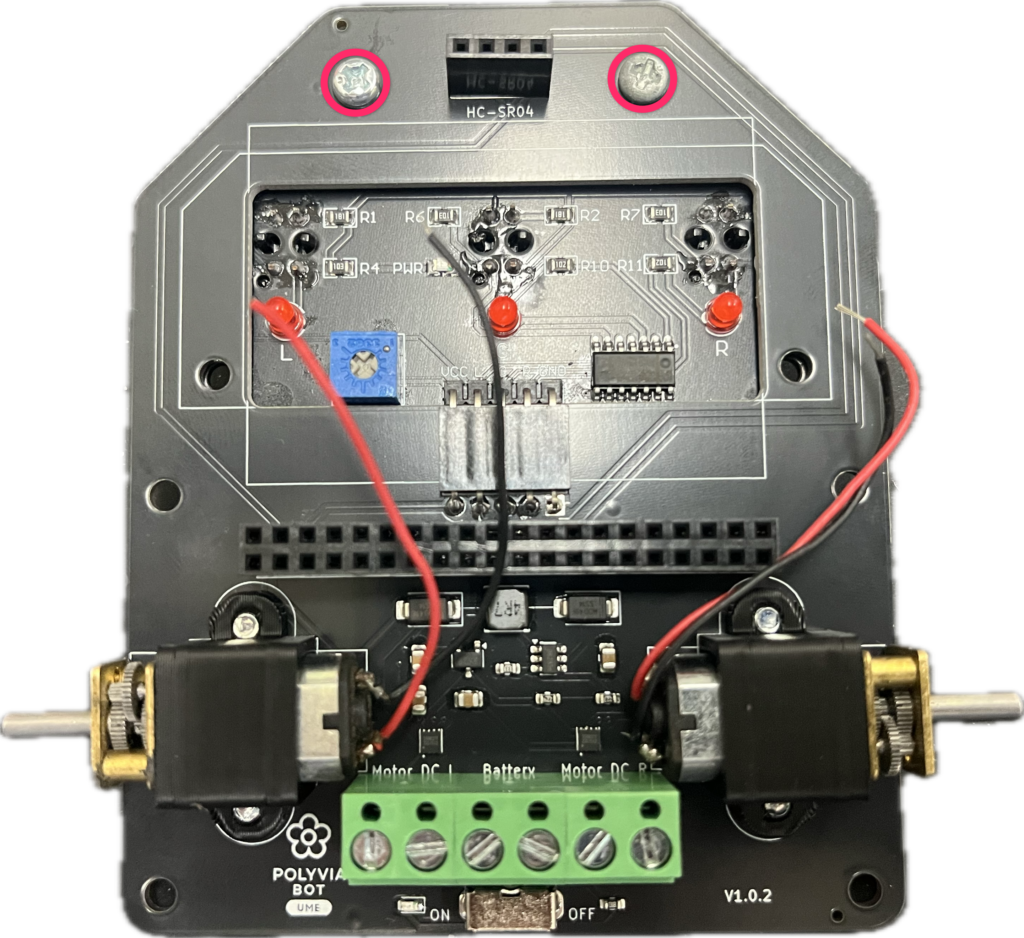
キャスターを取り付けます。
突起部分でラインセンサー基盤を挟み固定します。
表面から2か所、ねじ止めします。

タイヤを取り付けます。

モータの軸に差し込みます。
よく見るとモータの軸とタイヤの穴は円ではなく、Dの字になっています。
向きをよく見て差し込みます。

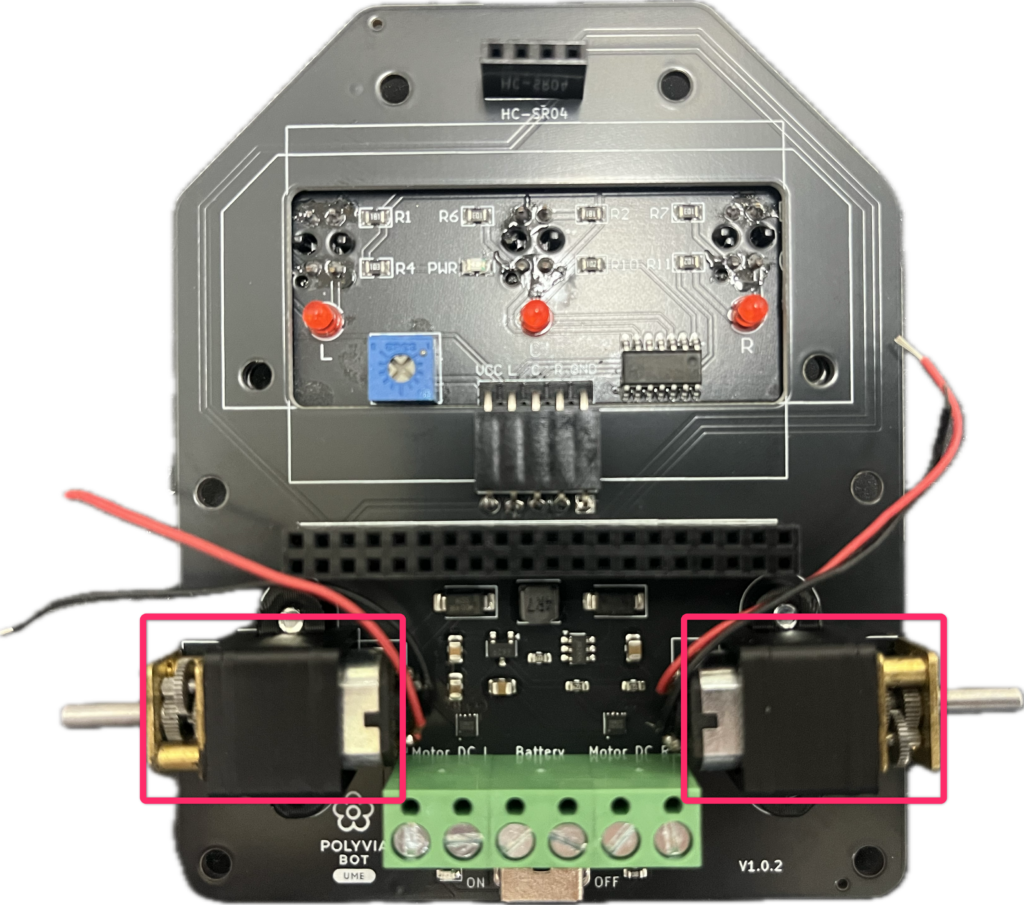
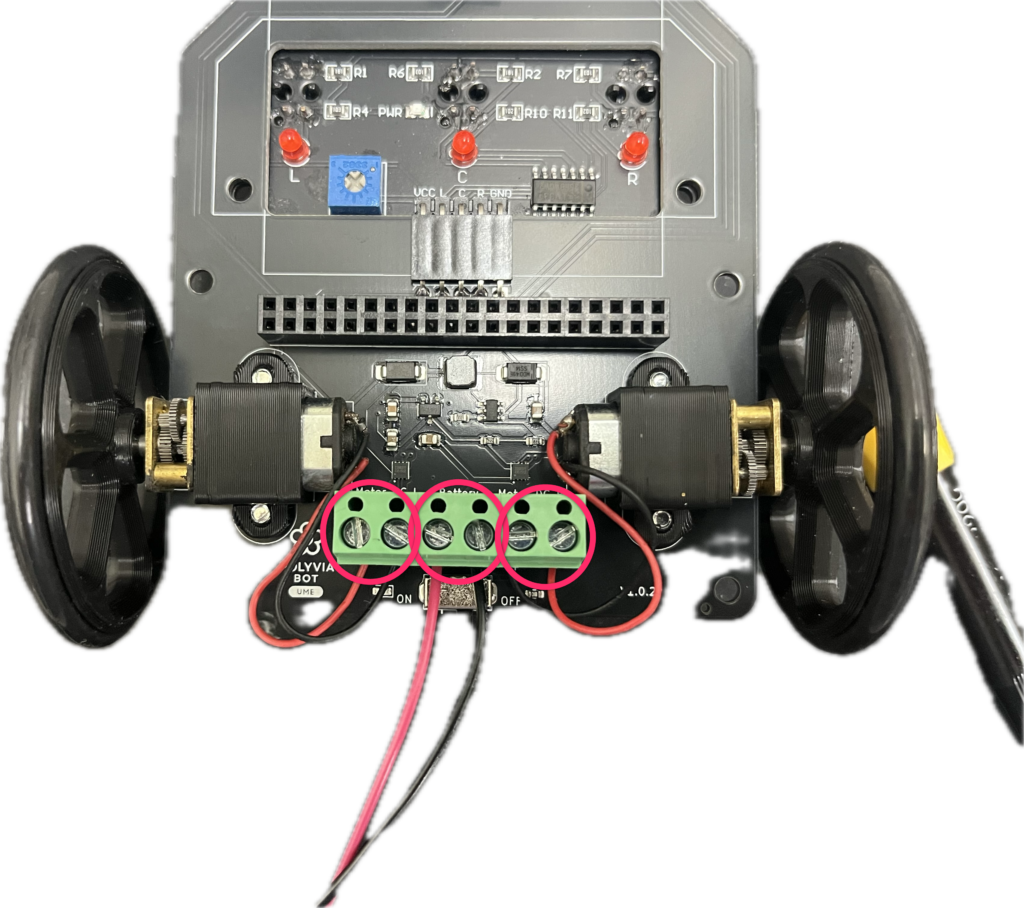
モータと電池BOXの配線を行います。
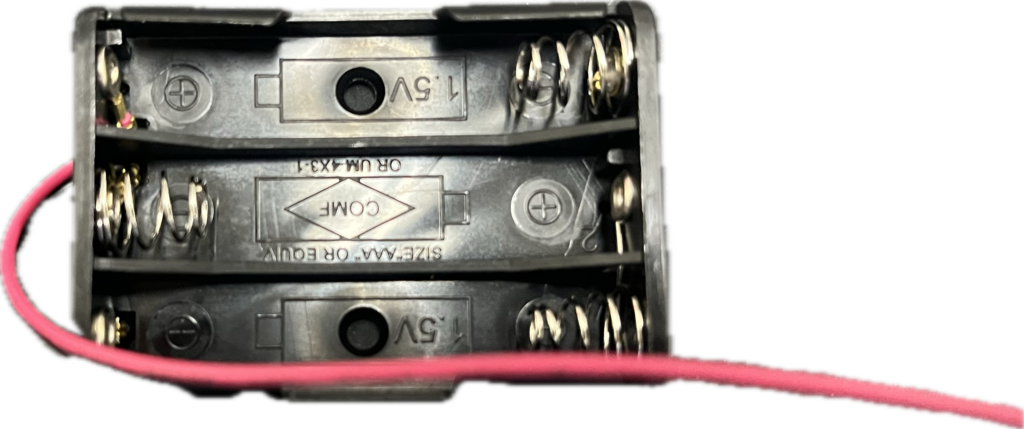
配線の色が下の写真のようになるようにターミナルに差し込みます。
ターミナルはマイナスドライバでねじを回すと、穴が狭まり、配線が固定できます。
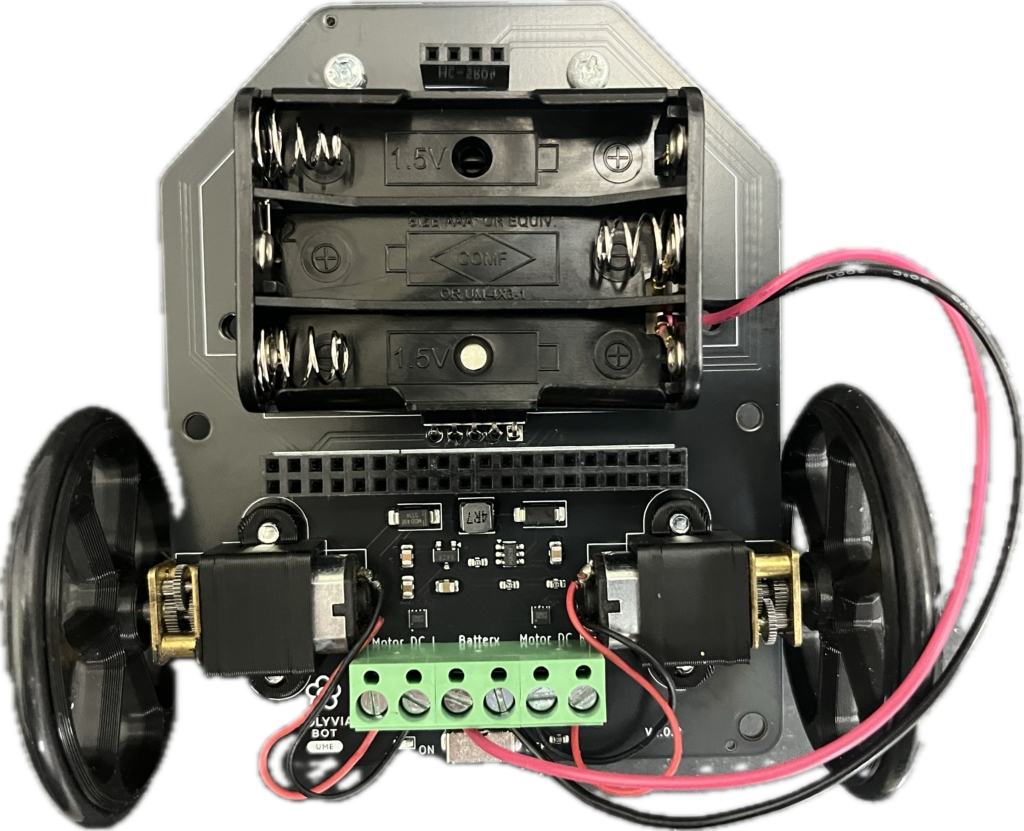
下の図の位置に電池BOXを固定します。
固定は強力な両面テープで行います。
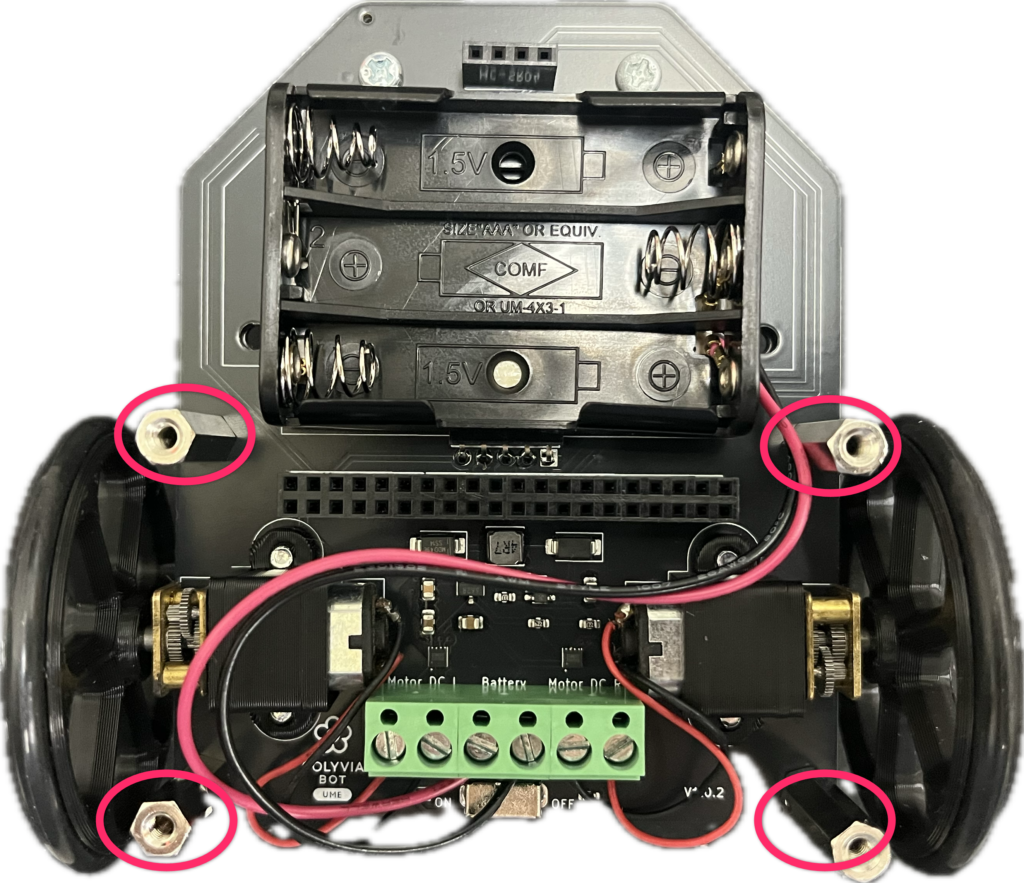
スペーサーを取り付けます。

裏面からナットで取り付けます。
超音波センサを取り付けます。
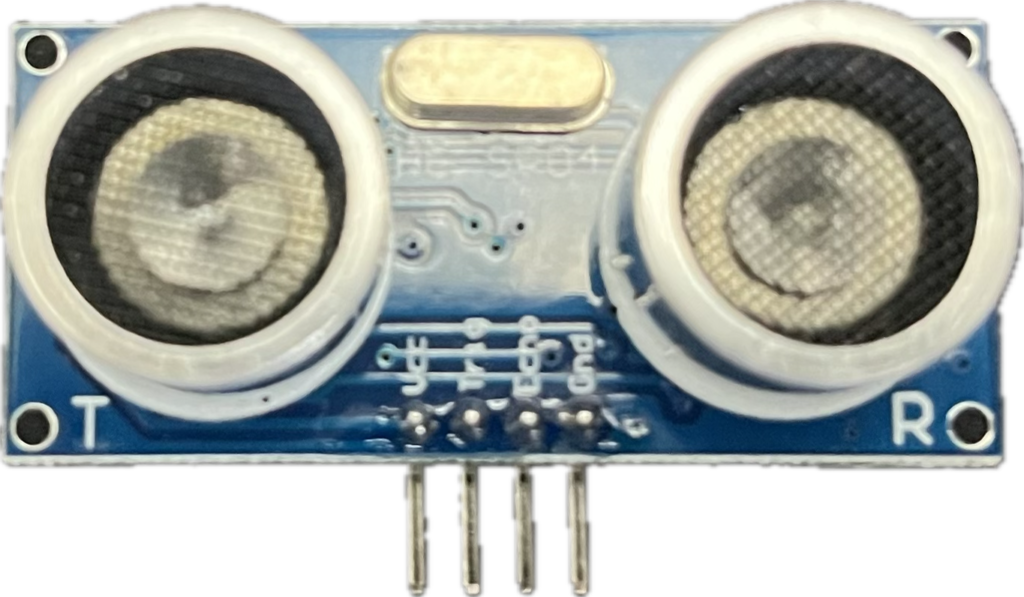
画像の位置に差し込むだけです。
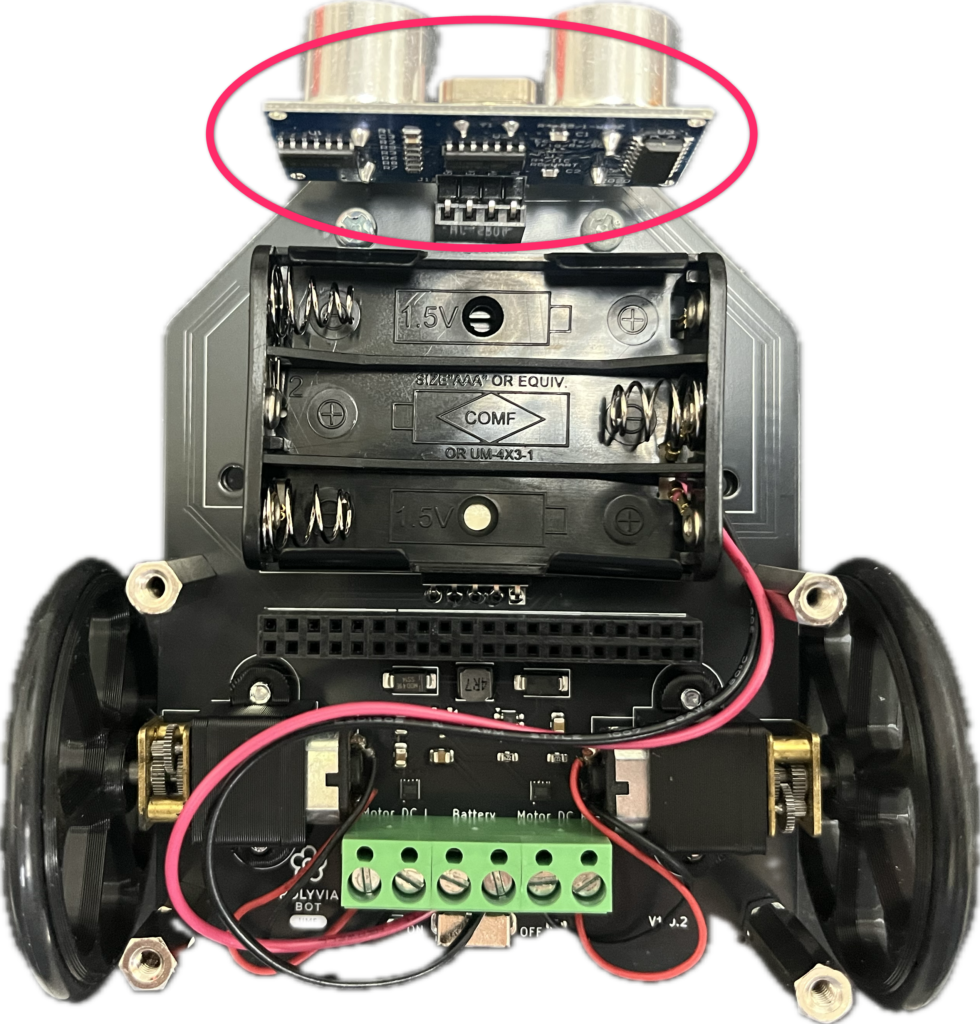
これでPoliviaBot UMEの下部ユニットの完成です。
以下、一連の流れです。
ステップ3 上部基盤の取り付け
上部基盤は使用するマイコンによって違います。下記はRaspberry Pi Pico用の基盤です。
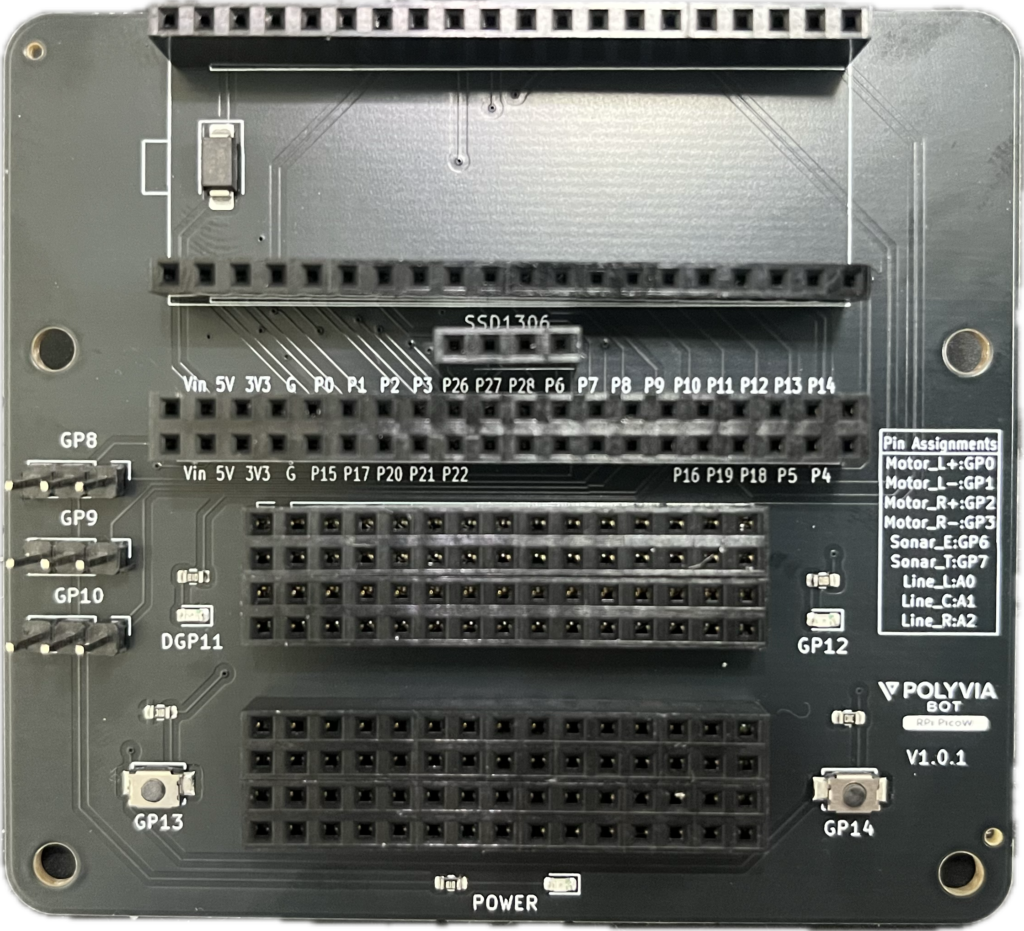
4隅の穴の位置が合うようにヘッダーピンを差し込み、ねじで固定します。
LCDとマイコンを取り付けて完成です。

9 動作前チェックリスト
- はんだブリッジがないか
- コネクタの向きが正しいか
- ネジの締め忘れがないか
- モータがスムーズに回るか
次回はいよいよこのロボットに頭脳を入れてゆきます。
次回はこちら
Follow me!