
モータのスイッチング
モータの回転を制御するためには、スイッチングが必要です。マイコンからスイッチングを行うためには、リレーやトランジスタなどの部品が使用されます。
リレー
リレーは電磁石に電流を流してスイッチの接点を引き寄せることでスイッチングを行います。これは物理スイッチです。
- メリット:
- 静電気に強い
- スイッチング損失が発生しない
- デメリット:
- 大きな電流を取り出せるものは高額でサイズが大きい
- 応答速度が遅い

https://akizukidenshi.com/catalog/g/g110691/
トランジスタ
半導体を用いたスイッチにはトランジスタがよく使われます。モータ制御にはMOSFET、バイポーラトランジスタ、IGBTがよく使用されます。
MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor)
MOSFETはモータ制御に最も多く使用される素子で、主に数十Vの低電圧領域で用いられるパワー半導体です。
- 特徴:
- 電圧駆動なので消費電力が小さい
- 数十V以下の低電圧用途に限れば効率が良い
バイポーラトランジスタ
バイポーラトランジスタは小型のモータを駆動するモータードライバICに使用されます。
- 特徴:
- 1素子当たり約1Vの電圧降下が生じる
- ベースに常に電流が流れるため消費電力が大きい
- 一般的には100mA程度までの駆動に用いられる
IGBT (Insulated Gate Bipolar Transistor)
IGBTはバイポーラトランジスタのベース端子がMOSFETのゲートに置き換わったもので、主に電車などの高電圧モータ駆動に用いられます。
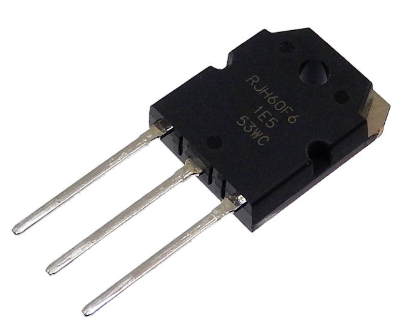
シリコンNチャネルIGBT(絶縁ゲートバイポーラトランジスタ) RJH60F6DPK
今回はFETを使ってモータを回転させる手法について勉強してゆきます。
前回はこちら

FETの概要
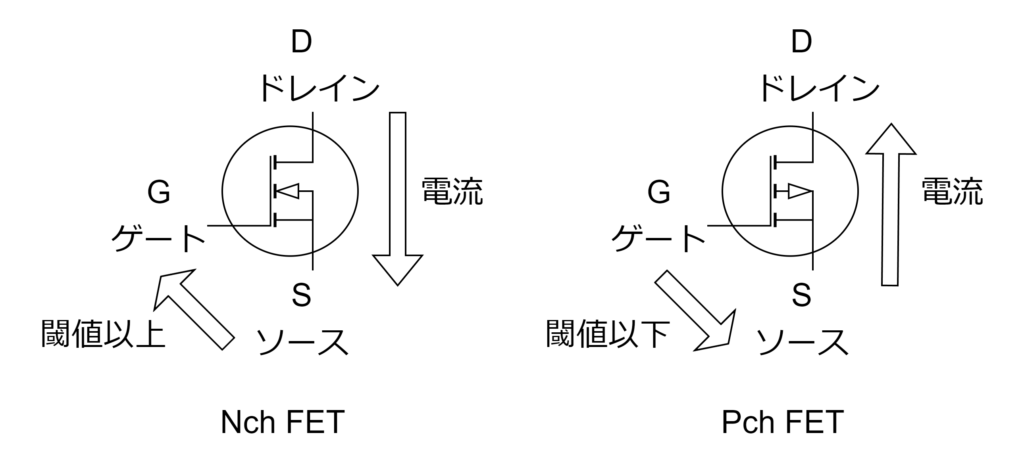
MOSFETの極性
トランジスタには極性があり、バイポーラトランジスタではnpnとpnp、MOSFETではNch(Nチャネル)とPch(Pチャネル)があります。この極性の違いにより、使い方や性能が大きく変わります。
NチャネルMOSFET(Nch)
NチャネルMOSFETは、ゲート・ソース間電圧(Vgs)がゲート閾値電圧(Vth)を超えると、ドレインからソースに電流が流れます。この特性から、スイッチとして利用する際にはソースの電位が0となる場合に使用されます。Nch MOSFETは、以下の特性を持ちます:
- スイッチング動作:ゲートに正の電圧を印加するとオンになります。
- ドレイン-ソース間電流:ドレインからソースに流れる。
PチャネルMOSFET(Pch)
PチャネルMOSFETは、ゲート・ソース間電圧(Vgs)がゲート閾値電圧(Vth)以下になると、ソースからドレインに電流が流れます。この特性から、スイッチとして利用する際にはソースの電位がオン・オフ時どちらでも電源電圧と同じになるハイサイドスイッチに多用されます。Pch MOSFETは、以下の特性を持ちます:
- スイッチング動作:ゲートに負の電圧を印加するとオンになります。
- ソース-ドレイン間電流:ソースからドレインに流れる。
NchとPchの比較
一般的に、NチャネルMOSFETの方がPチャネルMOSFETに比べて種類も多く、同じ値段で比較するとNchの方が性能が高い場合が多いです。
FETの各端子の役割と機能
FETの各端子の役割は基本的にトランジスタの各端子の機能と同等です。
- ゲート(Gate):FETの入力端子で、ドレイン-ソース間の電流を制御します。トランジスタのベースに相当します。
- ドレイン(Drain):電流が流れ出る端子で、トランジスタのコレクタに相当します。
- ソース(Source):電流が流れ込む端子で、トランジスタのエミッタに相当します。
FETとトランジスタの比較
オン抵抗
- FET:ドレインとソース間のオン抵抗が少なく、大きな電流を流せる。
- トランジスタ:コレクタ-エミッタ間の電流をベース電流で制御しますが、オン抵抗が高い傾向があります。
入力インピーダンス
- FET:ゲートの入力インピーダンスが高いため、前段の回路に対する負担が少ない。
- トランジスタ:ベースの入力インピーダンスが比較的低いため、前段の回路に一定の電流を要求します。
スイッチング速度
- FET:スイッチング速度が速く、少ないパワーで大きなパワーの高速制御が可能。
- トランジスタ:スイッチング速度はFETより遅い場合があります。
制御方法
- FET:ドレイン-ソース間の電流をゲート電圧で制御します。
- トランジスタ:コレクタ-エミッタ間の電流をベース電流で制御します。
注意点
FETは非常に便利な素子ですが、定格を超えた大電流を流す場合や、ゲート電圧が不十分な場合にはオン抵抗が下がりきらず、発熱や発火のリスクがあります。これに注意して使用することが重要です。
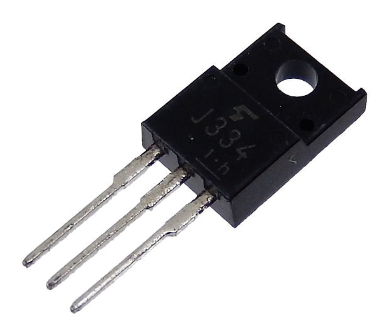
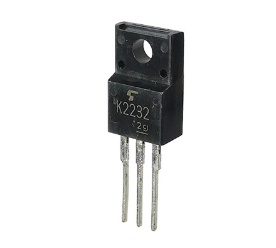
FETのデータシートの読み方
電子部品にはデータシートが用意されており、使用する際にはこのデータシートの示す使い方をしなくてはいけません。
今回はNch FET 2SK2232を例に挙げて説明してゆきます。
https://akizukidenshi.com/goodsaffix/2sk2232.pdf
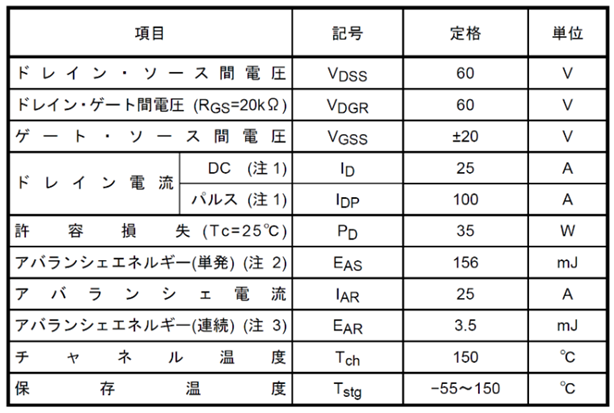
絶対最大定格
絶対最大定格とは、FETを選定する際に一瞬でも超えてはならない値であり、この項目と電気的特性の項目でFETの選定がほぼ決定されます。以下に、特に重要な項目について解説します。
ドレイン・ソース間電圧VDSS (Vds)
- 説明:ドレイン・ソース間の最大電圧です。2SK2232では、この値が60Vです。
- 選定基準:モータは逆起電力を発生させるため、電源電圧よりも高い電圧が印加される可能性があります。そのため、電源電圧の2倍程度の値を持つものを選びます。
- 注意点:VDSSが大きいほど安心ですが、オン抵抗(Ron)との相関関係があり、大きすぎるとオン抵抗も高くなるため、バランスが重要です。
ゲート・ソース間電圧VGSS (Vgs)
- 説明:ゲート・ソース間の最大電圧です。このFETでは±20Vです。
- 選定基準:使用する電源電圧を20V以下に設定する必要があります。
- 注意点:ゲート電圧が20Vを超えると、FETが破損する可能性があるため、ゲート駆動回路の設計に注意が必要です。
ドレイン電流ID (Id)
- 説明:FETに連続して流すことができる最大電流です。このFETでは最大25Aであり、パルス状の場合は100Aまで流すことができます。
- 選定基準:モータの始動電流以上のものを選定します。例えば、RS-380モータのストール電流は約13A、RS-540モータのストール電流は約57Aです。
- 注意点:ストール電流(ロック電流)を考慮し、機械的にロックしないように余裕を持って設計します。540モータの最大定格電流は9.95Aであるため、FETは倍の20A以上のドレイン電流IDを持つものを選ぶとよいです。
チャンネル温度
- 説明:FETの最高使用温度です。150℃以下であれば素子は壊れません。
- 選定基準:温度が高くなると、周囲の空気や部品に熱が伝わり、特に熱に弱い電解コンデンサなどに悪影響を与える可能性があります。
- 対策:FETにはヒートシンクや空冷ファンを取り付けて効率的に冷却することが推奨されます。
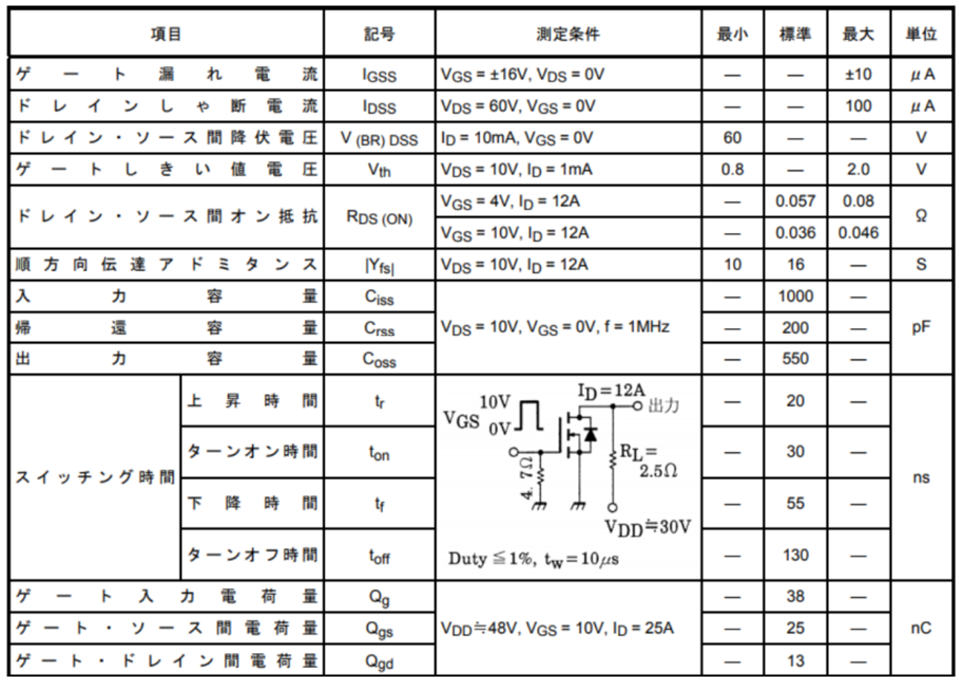
電気的特性
データシートに記載されている電気的特性は、FETの選定や使用において重要な情報を提供します。以下に、特に重要な項目について解説します。
ゲート閾値電圧Vth
- 説明:ゲート・ソース間の電圧がこの値を上回ると、FETがターンオン(導通)状態になります。
- 重要性:この値が低いほど、低いゲート電圧でFETをオンにできるため、低電圧の駆動回路でも使用可能です。
ドレイン・ソース間オン抵抗Rds (Ron)
- 説明:VgsがVthを超えてFETが導通状態になった際のドレインとソース間の抵抗値です。Vgsを高くするほど、この抵抗値は低くなります。
- 重要性:オン抵抗が低いほど、FETがオン状態のときに発生する電力損失が少なくなり、発熱を抑えることができます。これにより、FETの効率が向上し、全体のシステムのパフォーマンスも向上します。
- 相関関係:オン抵抗はVdsと相関関係にあり、データシートでもVgs=4V時よりもVgs=10V時の方がオン抵抗が低いことが示されています。
FETによるドライバ回路
FETを使用してモータを駆動させる際、下記の回路図の通り、安定した動作を確保するために、還流ダイオード、ゲート抵抗、ソース抵抗を使用します。それぞれの部品の役割について解説します。
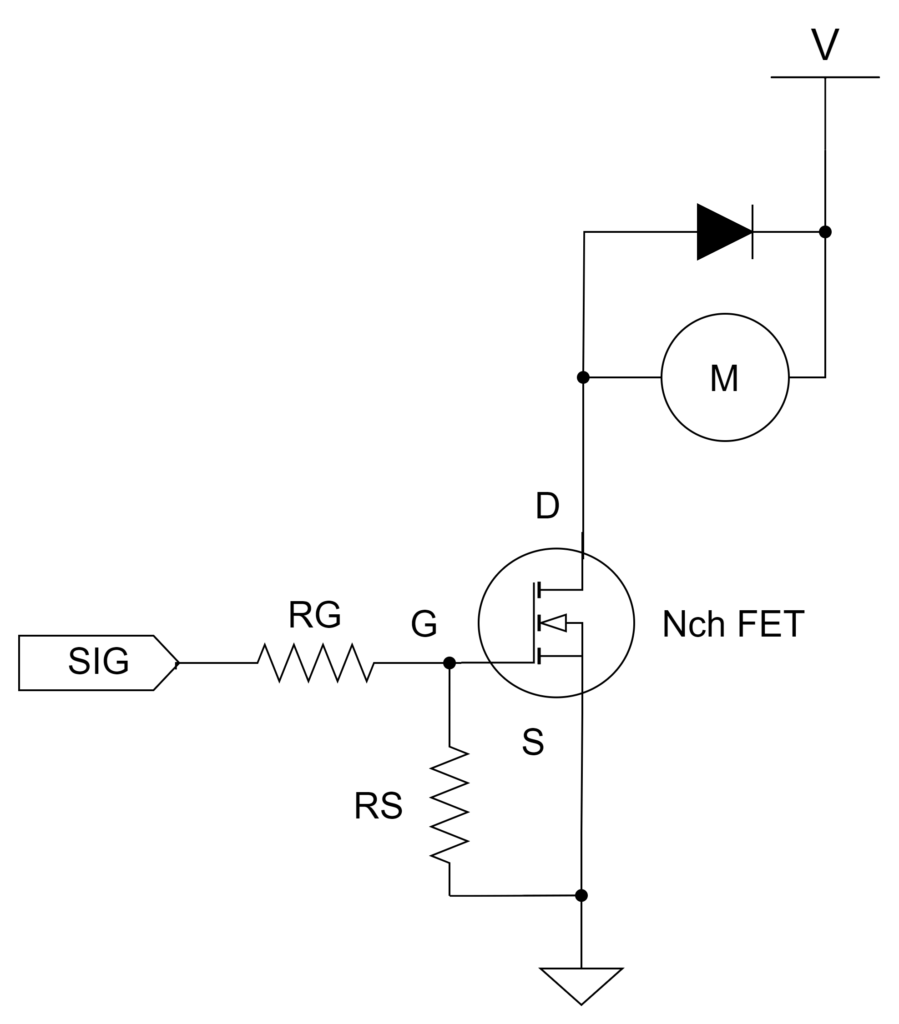
還流ダイオード
- 目的:FETを保護するために挿入します。
- 使用方向:正しい方向に挿入することが重要です。モータと並列に接続し、カソードが電源側、アノードがモータ側になります。
- 原理:FETがOFFになると、モータの自己誘導作用により逆起電力が発生します。逆起電力により、電源電圧Vccに加えて逆起電力VsがFETのドレイン-ソース間にかかります。Vsは瞬間的に非常に高電圧になるため、FETが破壊される可能性があります。還流ダイオードは、逆起電力によって発生した電流をすぐにショートさせ、FETのD-S間に高電圧がかからないようにします。
ゲート抵抗(RG)
- 目的:マイコン出力とFETのゲートの間に挿入し、FETの動作を安定させる(寄生発振による破壊を防ぐ)とともに、前段回路(マイコン)を保護する役目があります。
- 抵抗値:小さすぎると保護の役目を果たせず、大きすぎるとFETのスイッチング速度が低下します。本実験では10Ω程度の抵抗を使用します。
ゲート・ソース間抵抗(RS)
- 目的:入力信号がない時(オープンになった時)に確実にゲートの電位を0Vにするために挿入します。
- 理由:前段のマイコンの電源がOFFになると、ゲートがハイインピーダンス状態となり、FETが破壊される原因となることがあります。RS抵抗を挿入することで、ゲートはこの抵抗を経由してGNDと接続されるため、ゲートがハイインピーダンス入力になることを防ぎます。
- 抵抗値:通常10kΩ~数MΩの抵抗を使用します。本実験では10kΩの抵抗を使用します。
モータ制御 実験⑦
Arduino UNOとFETエンコーダ付きギアドモータ,半固定抵抗を使用して,モータの回転数が変化する装置を構成せよ.またPWMの値によりどのように回転数が変化するか計測せよ。
(横軸PWM、縦軸回転数のグラフを作成,モータの出力PWMもオシロスコープで記録,前回のモータ制御実験⑥の結果と比較)
次回はこちら

Follow me!