
モータとは?
モータとは、何らかのエネルギーを運動エネルギーに変換する装置のことです。モータにはいくつかの種類がありますが、主流は電動モータです。
電動モータとは?
電動モータは、電気エネルギーを運動エネルギーに変換する装置です。多くの電動モータは電磁気の作用を利用して、この変換を行います。電磁気の作用を利用しない電動モータもあり、例えば超音波モータや静電モータがそれに当たります。
回転形モータ
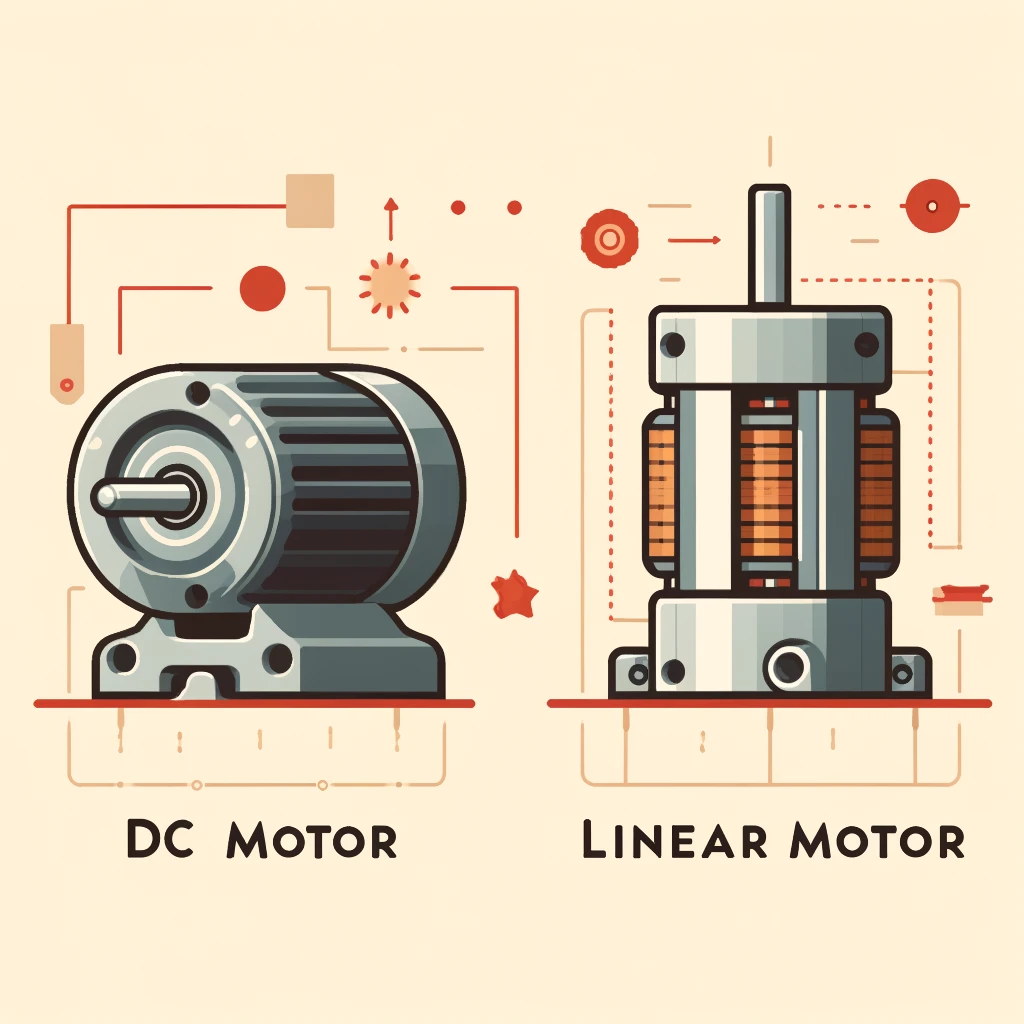
モータで得られる運動エネルギーは、回転運動が多いです。このようなモータを回転形モータ(ロータリ形モータまたはロータリモータ)といいます。これに対して、直線運動を生み出すリニアモータも存在します。
直流モータと交流モータ
電気には直流(DC)と交流(AC)があります。それぞれを電源にするモータは、直流モータ(DCモータ)と交流モータ(ACモータ)と呼ばれます。
直流モータ
直流モータでは、整流子とブラシという部品によって回転を連続させる整流子形モータが主流です。通常、直流整流子モータと呼ばれます。
現代のモータ
現在では、パルス波(矩形波、方形波)による駆動が前提のモータもあります。これらのモータは、駆動回路という半導体素子による電子回路で作ったパルス波を利用します。こうしたモータには、ブラシレスモータやステッピングモータ、RCサーボモータがあります。
ユニポーラ ステッピングモーターST-42BYG0506H https://akizukidenshi.com/catalog/g/g105374/
TowerPro サーボ MG996R https://akizukidenshi.com/catalog/g/g112534/
本サイト、モータ制御のカテゴリではDCモータ,ステッピングモータ,サーボモータの概要を学び,それぞれの特性,駆動回路の構成実験を行い,モータ制御に関する基礎を学んでゆきます。
トルクとは
力と単位
力そのものは、通常「ニュートン(N)」という単位で表されます。この単位は、物体を動かすための力の大きさを示しています。
トルクとは?
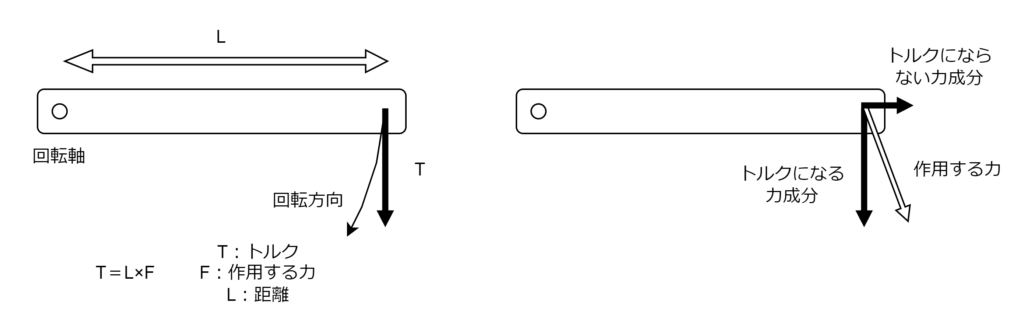
しかし、物体を回転させるための力は、力をどこで作用させるかによって変わります。例えば、ドアを押すとき、ドアノブの近くを押すよりも、ドアの端を押す方が少ない力でドアを回転させることができます。これは、回転軸からの距離が大きいほど、少ない力で回転させられるからです。
このように、トルクは力の大きさと、その力を作用させる位置(回転中心からの距離)の積で表されます。具体的には、トルクの単位は「ニュートンメートル(N・m)」です。1ニュートンメートル(1N・m)は、次のように定義されます:
「ある定点から1メートル離れた点に、その定点に向かって直角方向に1ニュートンの力を加えた時の、その定点の周りの力のモーメント」
力のモーメントとは?
力のモーメントというのは、簡単に言えば「回転させる力」のことです。物体がどのくらい回転しやすいかを表すものです。
トルクの他の単位
ちなみに、国際単位系(SI)には含まれていませんが、「キログラムフォースメートル(kgf・m)」という単位もトルクの単位として使われることがあります。これは、1キログラムの物体に地球の重力が働く力(およそ9.8ニュートン)を1メートルの距離で回転させる力のことを意味します。
力の方向とトルク
力が作用した点が回転する際、その点の軌跡は円を描きます。この円の接線方向に作用する力のみがトルクとなります。接線方向以外に作用する力の場合、その力の接線方向の成分だけがトルクになります。つまり、回転中心を通る方向に力が作用している場合、その力がどんなに大きくてもトルクは「0」になります。
トルクの種類
- 駆動トルク:モータが発揮しているトルクのことです。
- 負荷トルク:負荷の側のトルクのことです。モータが何かを動かす際、その動かされる側のトルクです。
- 負荷電流:負荷をかけて運転中のモータを流れている電流のことです。
- 最大トルク:電圧など一定の条件下でモータが発揮できる最も大きなトルクです。
- 始動トルク(または起動トルク):モータが始動時に発揮するトルクです。
始動トルクと負荷トルク
モータが始動する際に重要なのが始動トルクです。もし始動トルクより負荷トルクが大きいと、モータは始動できません。逆に、始動トルクのほうが大きければ、その差のトルクで回転を始めることができます。
トルク変動
モータによっては、回転子が1回転する間にトルクが変化することがあります。このような変化を「トルク変動」といいます。トルク変動が大きいと、回転が不安定になることがあります。
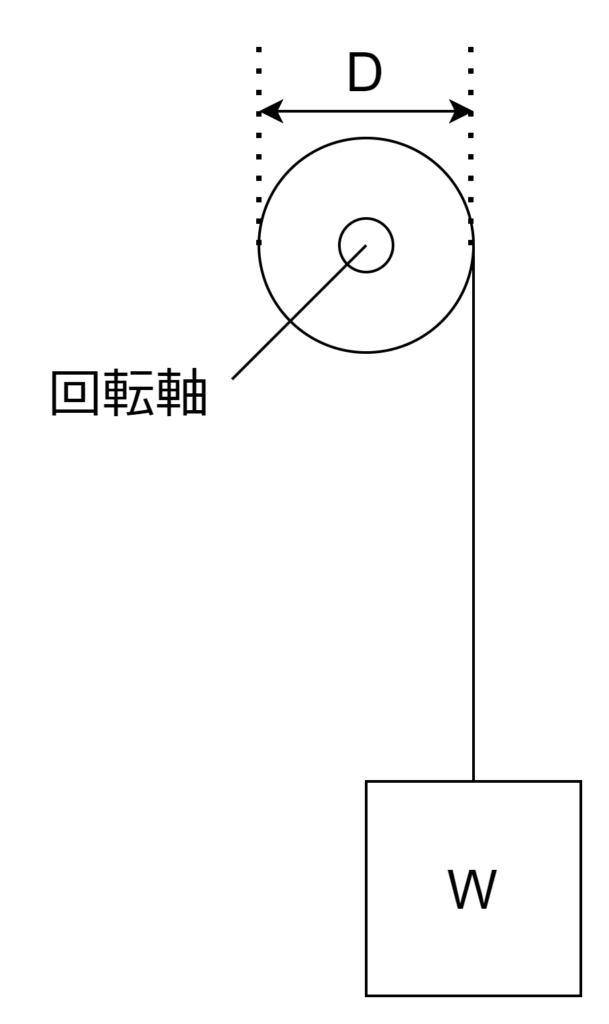
例題1:
次の場合のトルクを重力単位 [gf・cm]と SI単位 [mN・m] で求めよ。
・D=5cm、W=60g (Mサイズの卵)
答えはここをクリック
T = 0.5 × 5 × 60 = 150 [gf・cm]
T = 150 [gf・cm] × 9.8 ÷ 100 =14.7 [mN・m]
例題2:
35㎝の腕で500mlのペットボトルを持ち上げる際のトルクを重力単位 [gf・cm]と SI単位 [mN・m] で求めよ。

答えはここをクリック
T = 35 × 500 = 17,500 [gf・cm]
T = 17,500 [gf・cm] × 9.8 ÷ 100 =1,715 [mN・m]
回転数
モータの回転速度
モータの回転速度とは、単位時間に回転子が何回回転するかを示すものです。これは「回転数」とも呼ばれます。回転速度は以下のような単位で表現されます:
- 1秒間の回転数:[s⁻¹] または [Hz](ヘルツ)
- 1分間の回転数:[min⁻¹] または [rpm](回転/分)や [r/min]
例
- 1秒間に10回転する場合、回転速度は10 [s⁻¹] または10 [Hz] です。
- 1分間に600回転する場合、回転速度は600 [min⁻¹] または600 [rpm]です。
回転速度と角速度
回転速度が一定でない場合、その状態を回転速度では表現できません。そのため、単位時間に回転する角度で表現する「角速度」が使われます。角速度の単位は [rad/s](ラジアン/秒)です。
角速度の計算
角速度 = 回転数 × 2π(1回転は2πラジアン)
無負荷回転速度
無負荷運転とは、モータに負荷がかかっていない状態で運転することです。この時の回転速度を「無負荷回転速度」または「無負荷回転数」と呼びます。また、この時にモータを流れる電流を「無負荷電流」といいます。
注意点として、モータによっては無負荷運転を行うと非常に高速回転になり、モータが損傷する危険があります。
減速機構
小形の直流モータ
小形の直流モータは、ある程度まで回転速度を高めることができますが、その代わりにトルクが小さくなるという特徴があります。回転速度を高めることで効率が向上することもありますが、必要なトルクを確保することが課題となります。
半導体制御と減速機構
現代では、半導体制御を使ってモータの回転速度を幅広く制御することができます。しかし、制御によって回転速度を落とすと、トルクが不足する場合があります。そこで、駆動対象の求める回転速度やトルクに応じて、歯車による減速機構を組み合わせることがあります。
この減速機構を使うことで、回転速度を落としながらトルクを高めることができます。こうした歯車機構を内蔵したモータを「ギヤードモータ」といいます。また、モータの外部に取り付けやすいように作られた歯車機構は「ギヤヘッド」と呼ばれます。
減速機構の歯車の種類
減速機構には、主に次の2種類の歯車が使われます:
- 外歯歯車:シンプルな構造ですが、入力回転軸と出力回転軸が同軸になりません(組み合わせの数を増やせば同軸にすることも可能)。
- 遊星歯車(プラネタリーギヤ):サンギヤ、リングギヤ、プラネタリーギヤの3種類の歯車と、プラネタリーギヤの位置をまとめているプラネタリーキャリヤで構成されます。通常、リングギヤは固定され、モータの回転がサンギヤに伝えられます。サンギヤが回転すると、プラネタリーギヤは自転しながらサンギヤの周囲を公転し、この公転がプラネタリーキャリヤによって出力されます。

遊星歯車の特徴
遊星歯車は、入力と出力を同軸にできるという特徴があります。また、複数のプラネタリーギヤにトルクを分散できるため、大きなトルクの伝達が可能です。

モータの選定
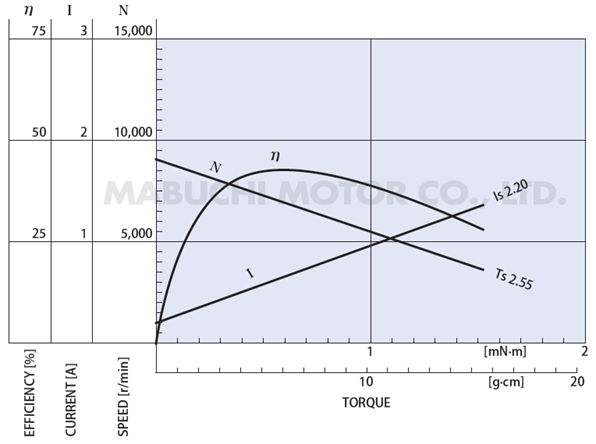
モータ性能線図
モータの仕様書には、特性とともに「モータ性能線図」が示されることがあります。この性能線図はトルクを基準として、以下の項目を読み取ることができます:
- 回転数
- 電流
- 出力
- 効率

重要な項目:適正負荷と回転数
モータを選定する際、特に重要な項目は「適正負荷」と「回転数」です。
適正負荷
適正負荷とは、モータが最も効率よく動作する負荷のことです。例えば、FA-130モータの適正負荷は0.39 [mN・m]です。
回転数
回転数は、モータが1分間に何回転するかを示す数値です。これもモータの選定において重要な指標です。
| 使用電圧範囲 | 1.5~3.0 V |
| 適正電圧 | 1.5 V |
| 適正負荷 | 0.39 mN・m |
| 無負荷回転数 | 8,600 rpm |
| 適正負荷時の回転数 | 6,500 rpm |
| 適正負荷時の消費電流 | 500 mA |
| シャフト径 | 2.0 mm |
モータの利用例
具体例として、直径5cmのベルト車を使って卵を持ち上げる用途を考えてみましょう。この用途では、必要なトルクが14.7 [mN・m]です。
FA-130モータの適正負荷は0.39 [mN・m]なので、これを直接利用するのは適切ではありません。そこで、減速機を使用してトルクを増やすことが一般的です。
減速機の使用
減速機を使用する際には、以下の点を検討する必要があります:
- 減速比:どの程度の減速比が必要かを考えます。減速比が大きいほど、出力トルクが増えますが、回転数は減少します。
- 用途に適した回転数:減速機を使用したときの回転数が、用途に適した速度になっているかを確認します。
例題3:
ベルト車で荷重を持ち上げる場合を考える。D=3cm, W=8g で,使用したモータが下記のモータ性能線図であった場合の回転数・電流を求めよ。
答えはこちらをクリック
D=0.5xDxW=0.5x3x8=12gf・cm 横軸(TORQUE)の「12gf・cm」
の縦軸(SPEED)を見ると 4500rpm縦軸(CURRENT)を見ると 1.15A
例題4
例題3と同じ装置,同じモータを使用し,D=6cm, W=60g,使用した減速装置の減速比が1/50, 伝達効率0.73だった場合の回転数を求めよ。
答えはこちらをクリック
T=0.5xDxW=0.5x6x60=180gf・cm
減速比は1/50なので、トルクは 180gf・cm / 50 = 3.6gf・cm
伝達効率は 0.73なので、3.6/0.73=4.9gf・cm
横軸(TORQUE)の「4.9gf・cm」の縦軸(SPEED)を見ると 7500rpm
7500/50=150rpm
次回はこちら

Follow me!