
前回はKiCAD付属のNGSpiceを使ってタイマーIC555の解析を行いました。

今回はこの回路を応用して、サーボモータの駆動を簡単に確認できるサーボテスター回路を自作してみます。
サーボモータの駆動
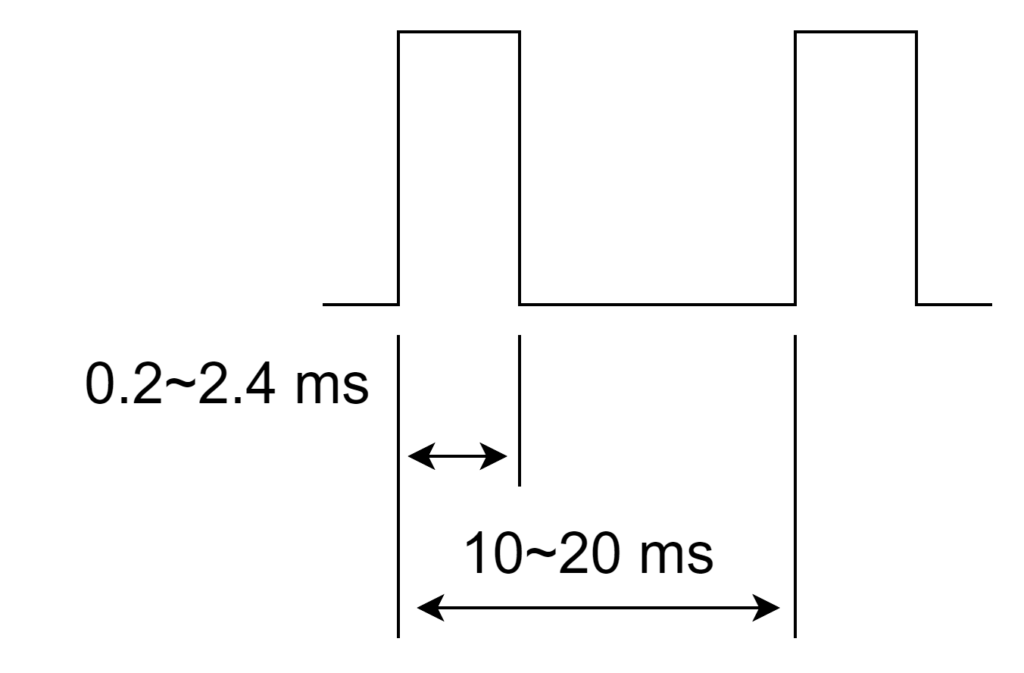
RCサーボモータはPWM信号によって駆動します。
PWMについてはこちらの記事を参照してください。

一般的なサーボモータは周期が10~20ms、デューティー比が3~30%程度で駆動します。
今回はタイマー IC 555と可変抵抗を使って、可変抵抗の値を変えると、デューティ比が変化する回路を作ります。
タイマーIC 555回路の改造
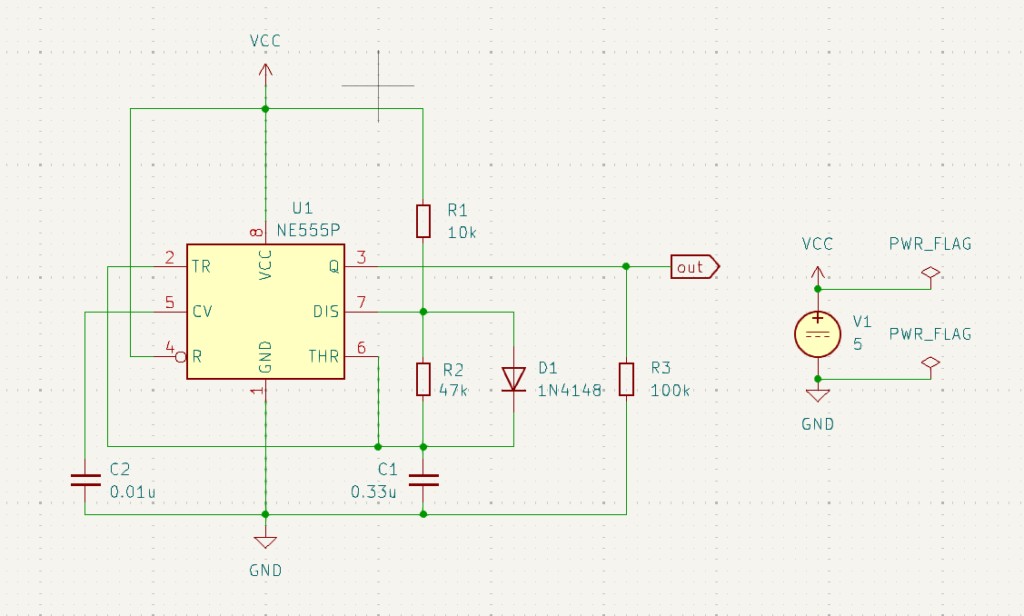
前回作成したタイマーIC回路では原則50%以下のデューティ比を持つ発信回路を作ることが出来ません。
タイマーIC 555はコンデンサへの充電と放電を繰り返す事で矩形波の信号を作っています。
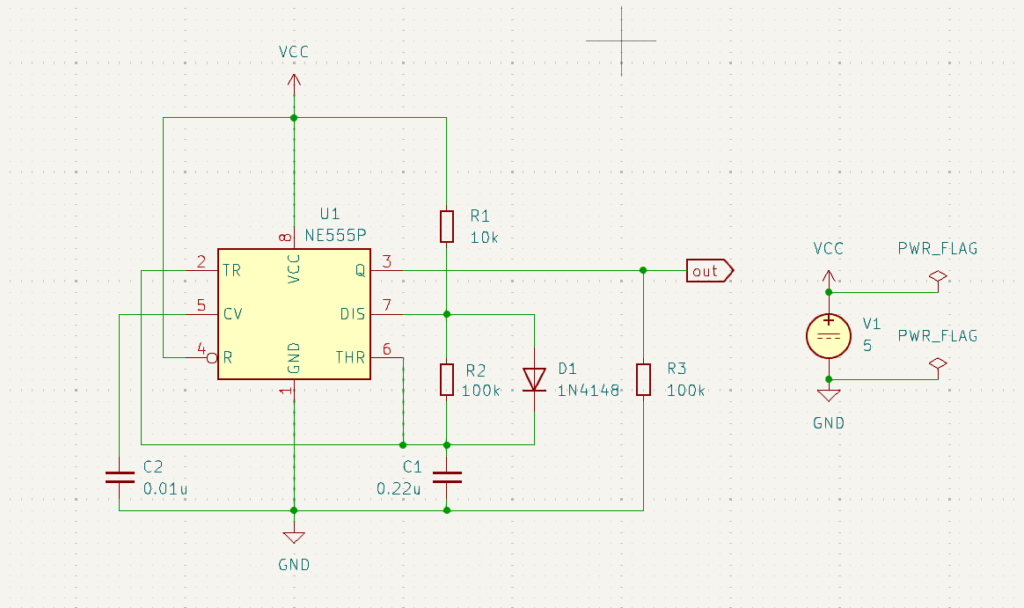
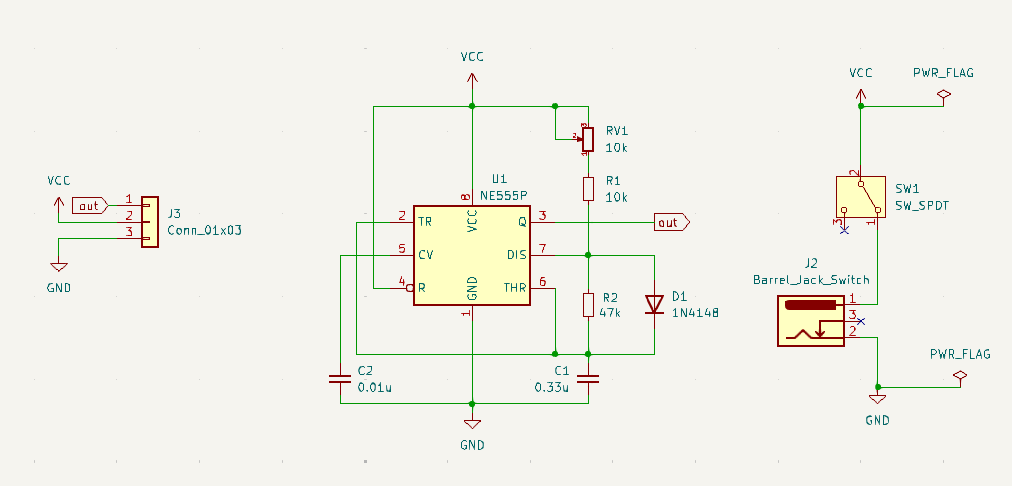
そこで下の図のようにR2に並列にダイオードをつなぎます。
すると、R2に電流が流れる際に、ダイオードを経由して電流が流れる為、すぐに充電が行われます。
よって、HIGH状態がすぐに終わり、LOW状態に切り替わる為、低いデューティー比を実現することが出来ます。
シミュレータで確認してみます。
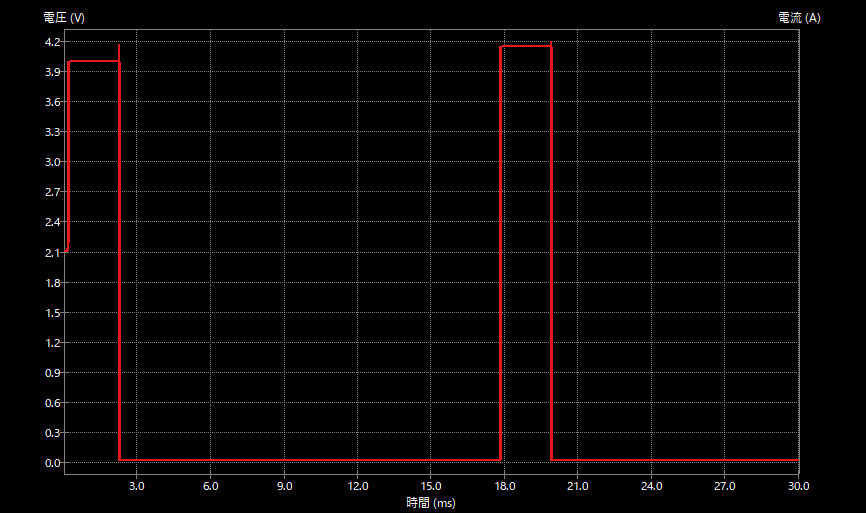
欲しかったデューティー比に近いものが得られるようになりました。
コンデンサと抵抗の値を調整し、抵抗値を変化させても周期が10ms~20msに収まるように変更します。
この状態でR1を1kΩ~11kΩで変化させると丁度良い感じにデューティー比が変化してくれます。
最終的な回路図
よって最終的には以下のような回路が出来上がります。
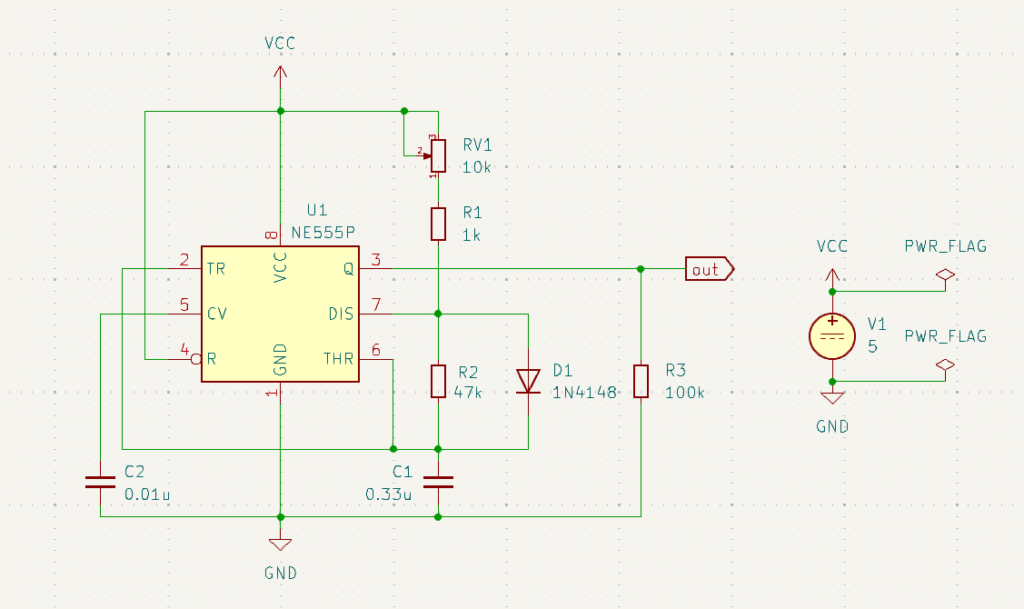
可変抵抗は10kを使用し、1kΩの抵抗と直列にすることでR1を1~11kΩで可変させることが出来ます。
シミュレーションの為に使用した抵抗やシンボルを削除し、電源とスイッチを追加します。
電源は5VのACアダプタから供給する事にします。
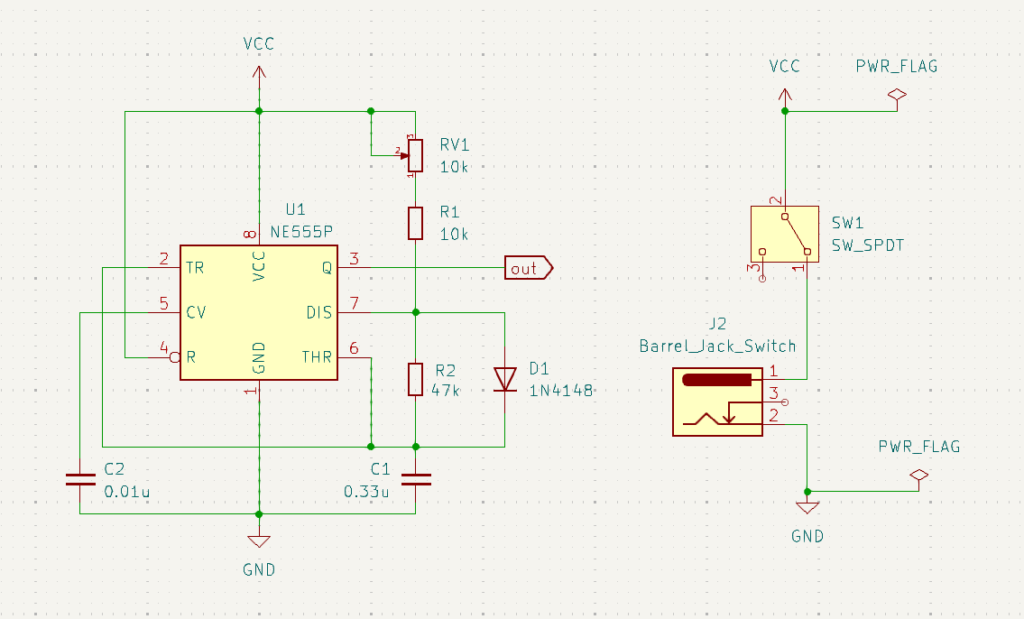
サーモモータの駆動にはヘッダーピンを使用します。
これで機能が出そろいました。
折角なので基板設計まで行います。
フットプリントの設定
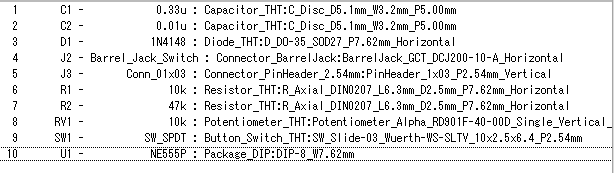
セラミックコンデンサ
一般的なタイプのセラミックコンデンサを使用します。
https://akizukidenshi.com/catalog/g/g116533/

フットプリント名:Capacitor_THT:C_Disc_D5.1mm_W3.2mm_P5.00mm
ダイオード
秋月で安く買える1N4148を使用します。
https://akizukidenshi.com/catalog/g/g100941/

フットプリント名:Diode_THT:D_DO-35_SOD27_P7.62mm_Horizontal
DCジャック
ACアダプタは一般的な5V2Aの物を想定します。
スイッチングACアダプター 5V2A
https://akizukidenshi.com/catalog/g/g111996/

プラグ径は外形5.5mm、内径2.1mmです。
こちらが良さそうです。
2.1mm標準DCジャック(4A) 内径2.1mm外径5.5mm
https://akizukidenshi.com/catalog/g/g101604/

データシートの図面を見ると以下のような配置になっています。
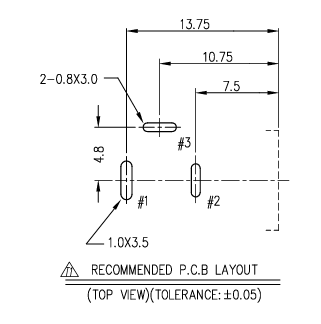
こちらが合いそうです。
フットプリント名:Connector_BarrelJack:BarrelJack_GCT_DCJ200-10-A_Horizontal
ヘッダーピン
ヘッダーピンはこちらを使いましょう。
長いヘッダーピンを折って使っても良いです。
https://akizukidenshi.com/catalog/g/g106192/

フットプリント名:Connector_PinHeader_2.54mm:PinHeader_1x03_P2.54mm_Vertical
抵抗
抵抗は金属皮膜抵抗を使用します。
https://akizukidenshi.com/catalog/g/g108560/

フットプリント名:Resistor_THT:R_Axial_DIN0207_L6.3mm_D2.5mm_P7.62mm_Horizontal
可変抵抗
可変抵抗は基板に取り付けられるタイプのものを使用します。
https://akizukidenshi.com/catalog/g/g114773/

フットプリント名:Potentiometer_THT:Potentiometer_Alpha_RD901F-40-00D_Single_Vertical_CircularHoles
スイッチ
秋月で購入できる小さいスライドスイッチにします。
https://akizukidenshi.com/catalog/g/g115643/
フットプリント名:Button_Switch_THT:SW_Slide-03_Wuerth-WS-SLTV_10x2.5x6.4_P2.54mm
タイマーIC 555
こちらを使います。
https://akizukidenshi.com/catalog/g/g114051/
フットプリント名:Package_DIP:DIP-8_W7.62mm
これですべて指定できました。
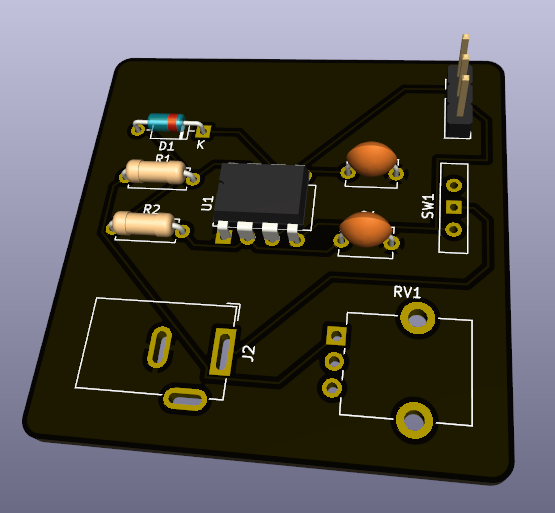
基板設計
あとはお楽しみの基板設計を行います。
せっかくなのでコンパクトに仕上げましょう。
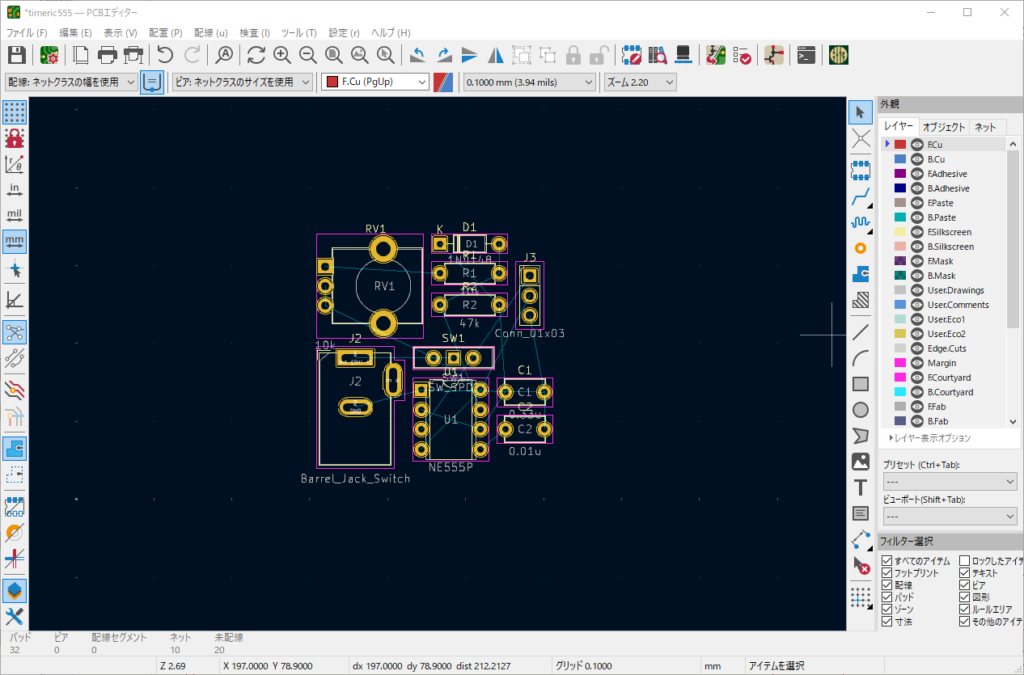
DCジャックと電源スイッチ、ボリュームの位置は使いやすい位置に配置します。
サーボモータを指すヘッダーピンは特に抜き差しを繰り返しますので、上下に部品を置かないようにします。
こんな感じでしょうか。
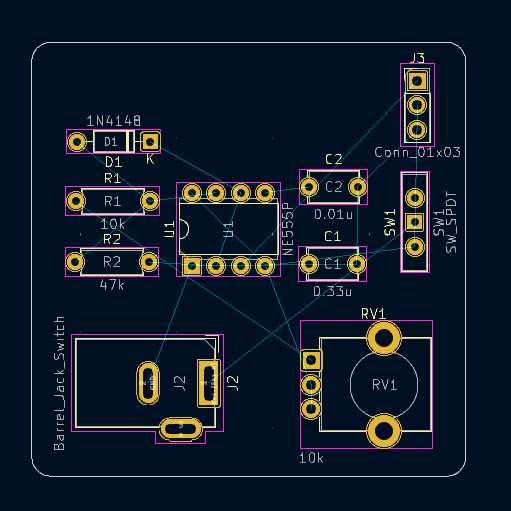
ちょうど45mm×45mmの基板に収まりました。
GNDベタをぬり、配線します。
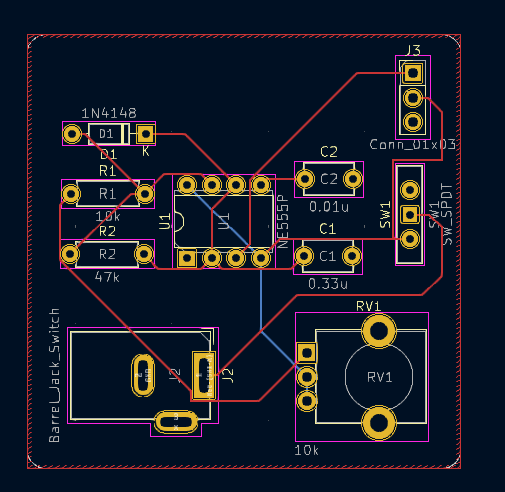
完成です。
これで、シミュレータを使いながら実用的な回路を作れるようになりました。
次回は3Dモデルを設定します。

\ 最新情報をチェック /