
KiCADには回路シミュレータ(NGSpice)も搭載されています。
今回はKiCADを使ったシミュレーションを触ってみます。
扱うICはタイマーIC555を使った、発信回路です。
この回路を応用すると次回説明するサーボテスターを作ることが出来ます。
前回はこちら

タイマーIC555とは
555タイマーICは、下図に示すように8ピンのタイマーICであり、非常に汎用性が高い部品です。
https://akizukidenshi.com/catalog/g/g114051/
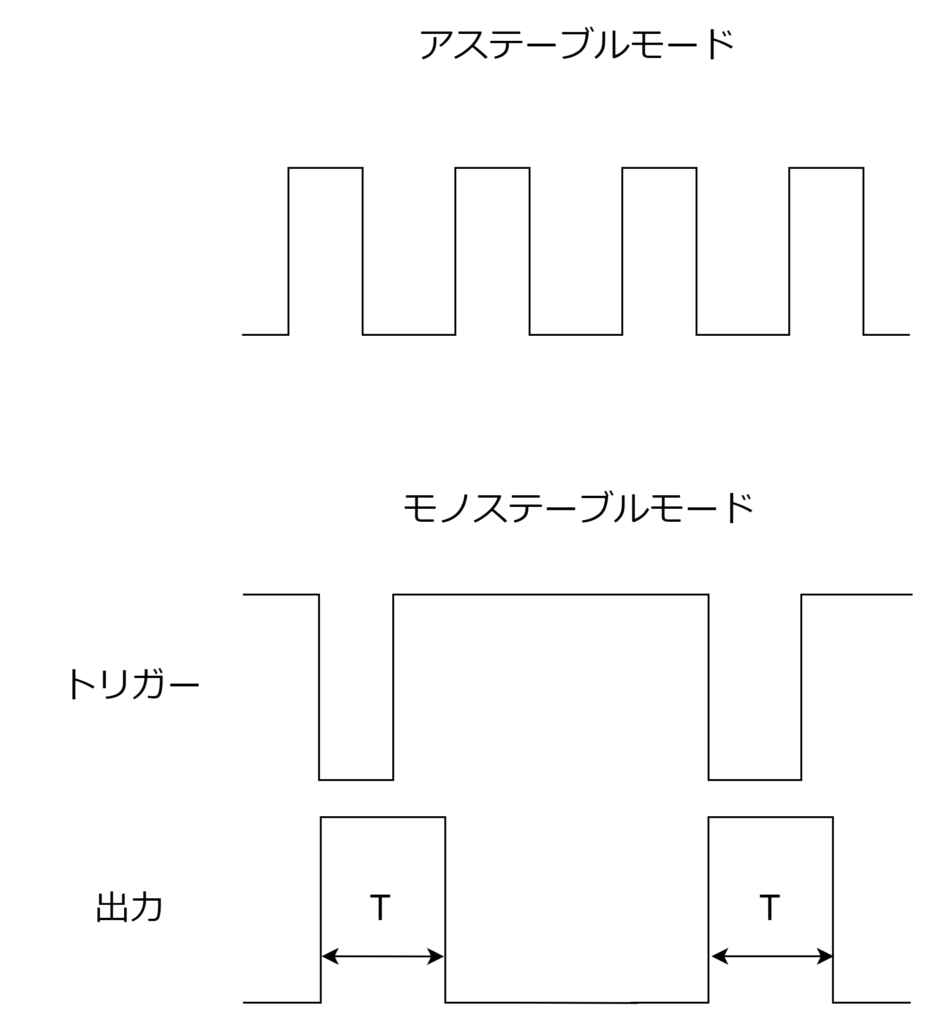
555には以下の2つの動作モードがあります:
- アステーブルモード(Astable Mode):
- 機能:連続的に方形波信号(矩形波信号)を出力します。
- 用途:発振器やクロック信号の生成に使用されます。
- モノステーブルモード(Monostable Mode):
- 機能:トリガー信号を受けると一定長さのパルスを1つだけ出力します。
- 用途:ワンショットパルス生成、デバウンス回路などに使用されます。
NE555タイマーIC
NE555は、555タイマーICのうちの1つで、以下の特徴があります:
- 価格:安価で、20円程度。
- 出力電流容量:最大200mAの出力電流容量を持ち、小型リレーなどを直接駆動することができます。
- その他のバージョン:一般にはNE555やCMOSタイプのLMC555などがよく使用されます。
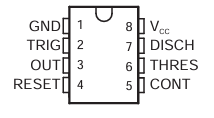
555タイマーICのピン配置
図のように、555タイマーICのピン配置は以下の通りです:
- GND(Pin 1):グラウンド
- VCC(Pin 8):電源電圧
- Trigger(Pin 2):トリガー入力
- Output(Pin 3):出力
- Reset(Pin 4):リセット入力(低レベルでリセット)
- Control Voltage(Pin 5):制御電圧入力(デフォルトで1/3 VCC)
- Discharge(Pin 7):ディスチャージ(コンデンサの放電用)
- Threshold(Pin 6):しきい値入力
https://www.ti.com/jp/lit/gpn/ne555
今回はアステーブルモードで使用します。
アステーブルモード
アステーブルモードは、フリーランニングモードあるいはマルチバイブレータモードとも呼ばれます。このモードでは、接続する抵抗とコンデンサの組み合わせにより、任意の周波数(f=1/T)とデューティ比Dを持った方形波信号が出力されます。
出力信号
- 周波数(f):接続する抵抗(R1、R2)とコンデンサ(C)の値により、任意の周波数が設定可能です。
- デューティ比(D):抵抗とコンデンサの値により、デューティ比を調整できます。
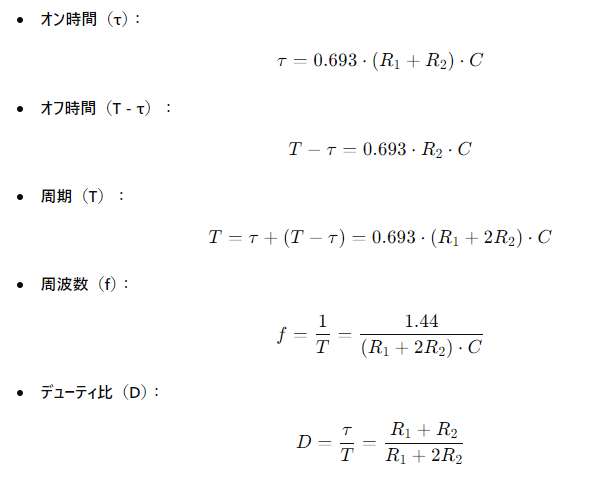
周波数とデューティ比の計算
NE555を使用したアステーブルモードでの出力信号の周波数(f)とデューティ比(D)は以下のように計算されます:
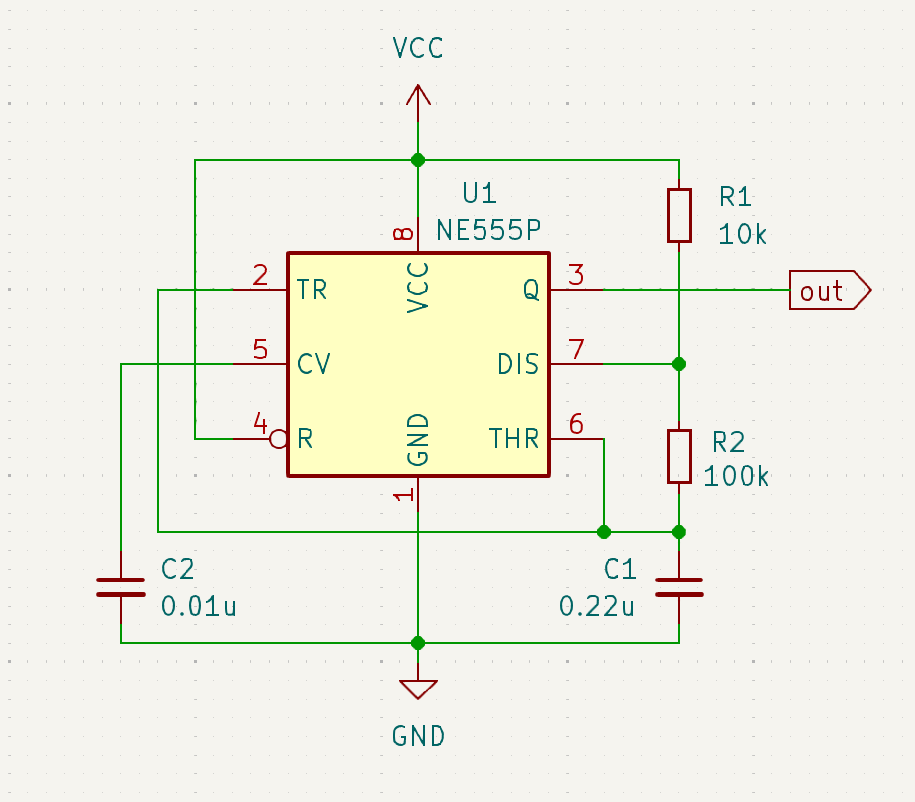
アステーブルモードの周辺回路構成
アステーブルモードでNE555タイマーICを動作させるための回路を下記に示します。以下の説明に従って周辺回路を構成します。
電源電圧
- 電源電圧:直流5~15Vに対応。
周辺部品
- 抵抗(R1):出力信号の周波数とデューティ比を設定するために使用。
- 抵抗(R2):出力信号の周波数とデューティ比を設定するために使用。
- コンデンサ(C1):出力信号の周波数を設定するために使用。
- バイパスコンデンサ(C2):ノイズをGNDに逃がすために取り付ける。0.01~0.1μF程度の積層セラミックコンデンサを使用。
KiCADを使ったシミュレーション
実際に上記の計算通りになるかシミュレーションをしてみます。
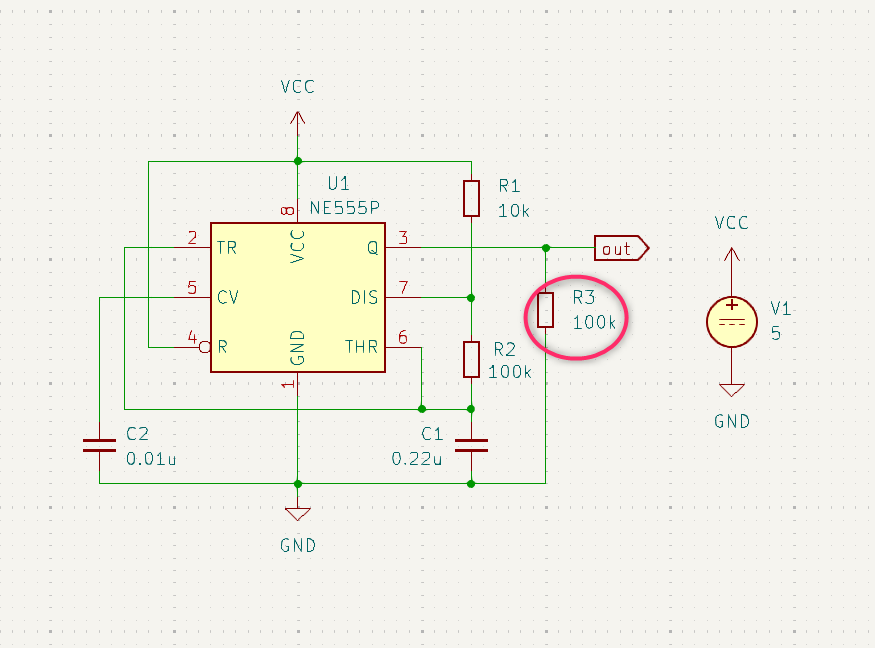
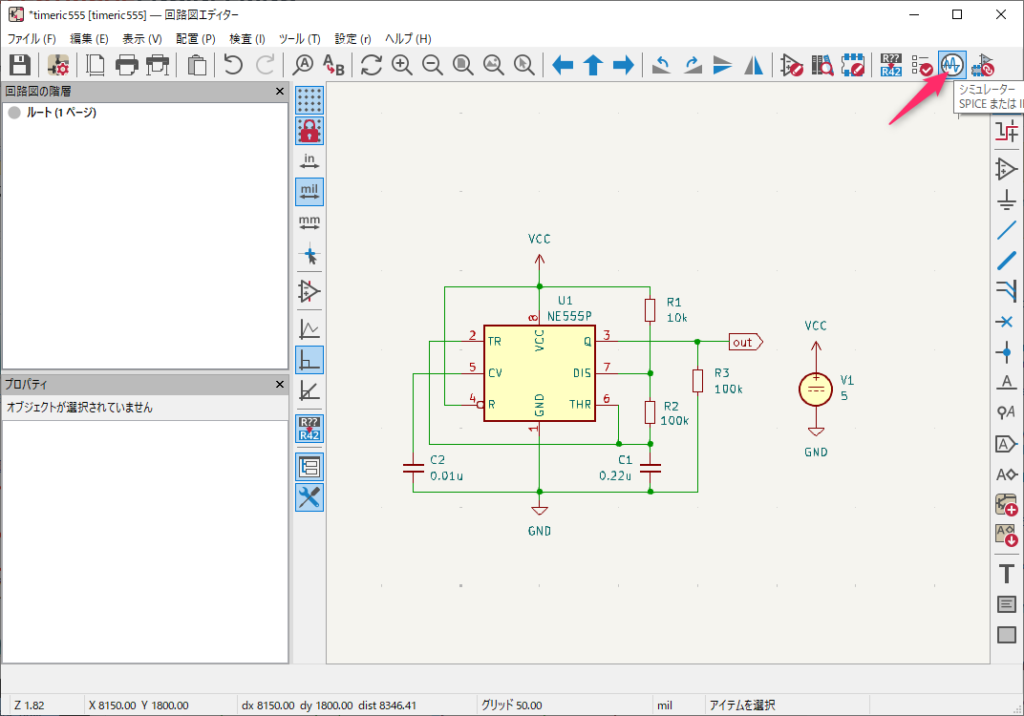
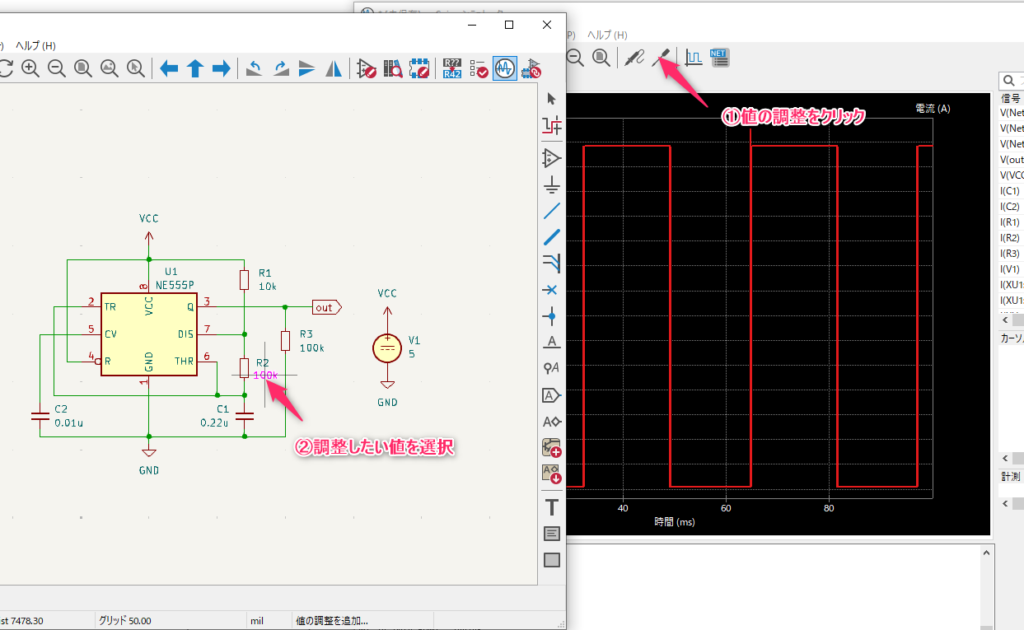
まずは下記の図を参考に回路図を作成します。
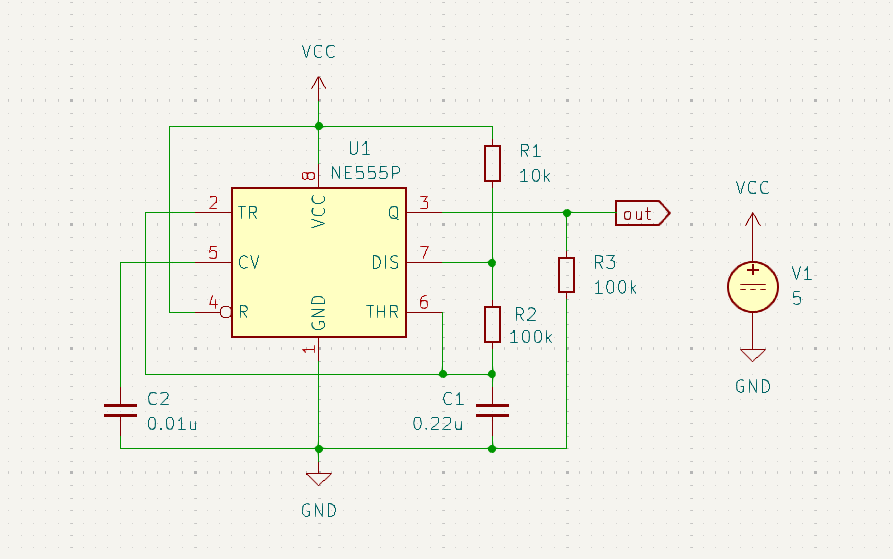
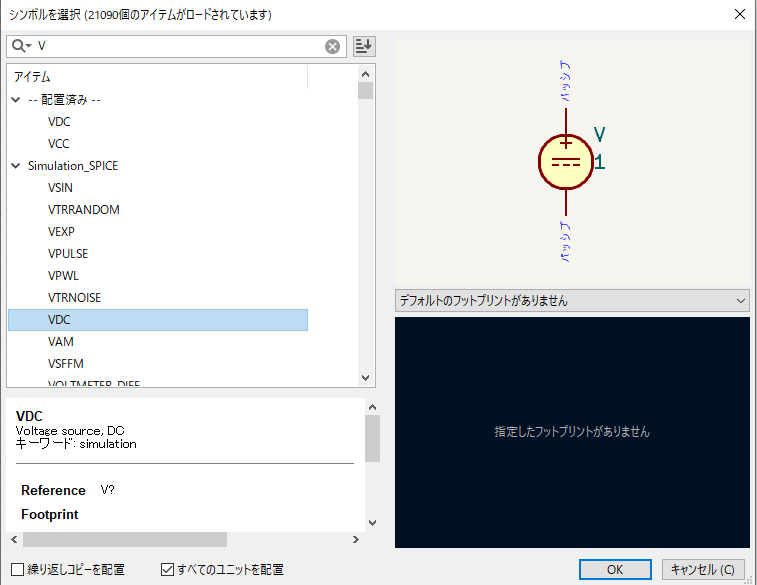
直流5Vを電源として解析しますので、電源は以下のモデルを使います。
出力は3番ポートから出てきますが、浮いている状態だとうまくシミュレーションできない為、100kΩの抵抗をGNDへ向けて繋ぎ、電流を流しています。
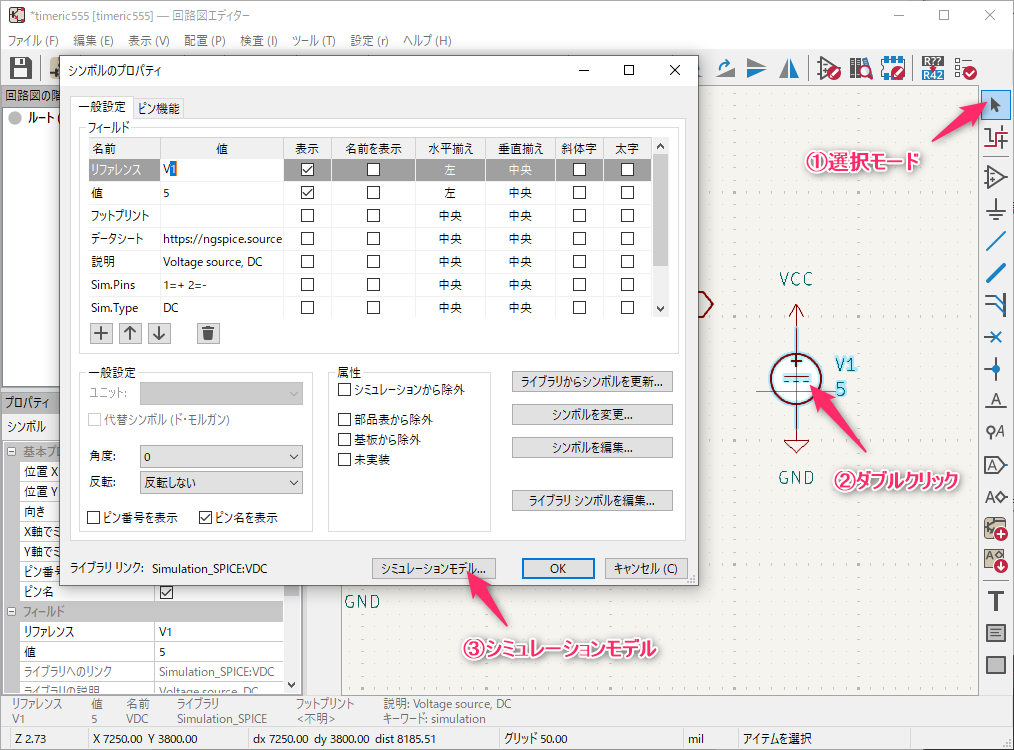
モデルの設定
解析用にモデルの設定が必要です。
電源のモデルをダブルクリックし、シミュレーションモデルをクリックします。
電源を5VにしてOKを押します。
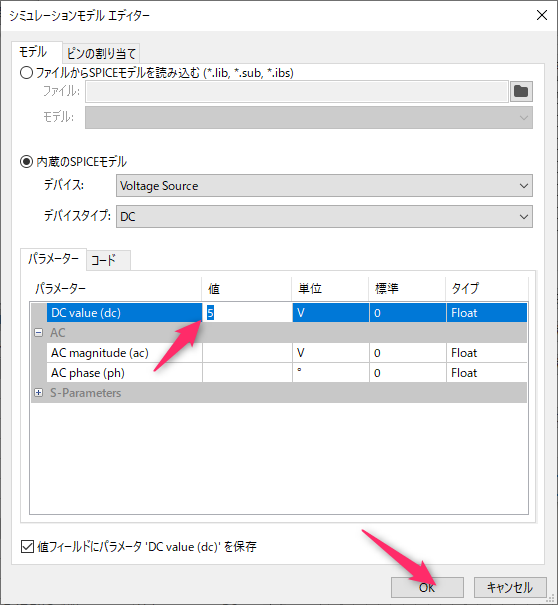
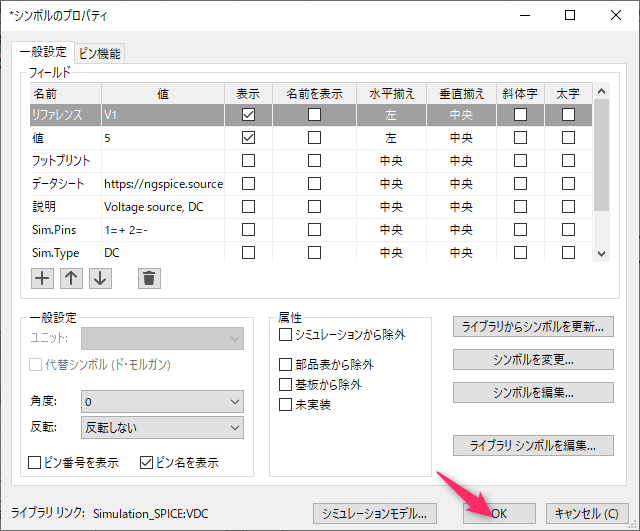
OKを押します。
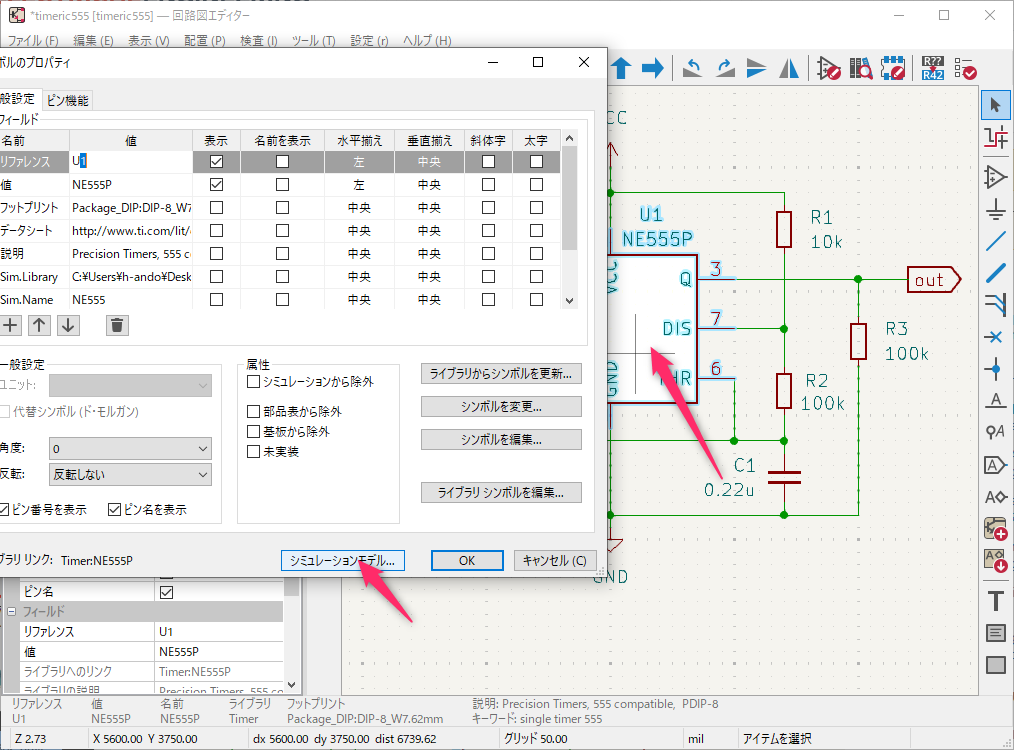
続いてNE555のモデルを設定します。
ネット上に公開されているNE555のspiceモデルを探してきます。
今回はこちらのサイトで公開されていたものを持ってきました。
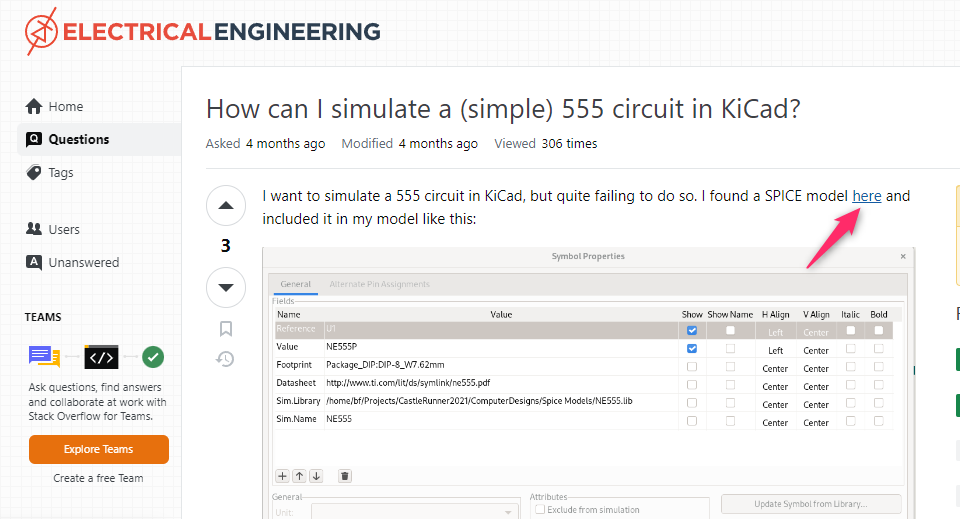
分かりやすい所に保存しておきます。

先ほど同様、NE555のモデルをダブルクリックし、シミュレーションモデルをクリックします。
ダウンロードしたファイルを選択し、OKします。
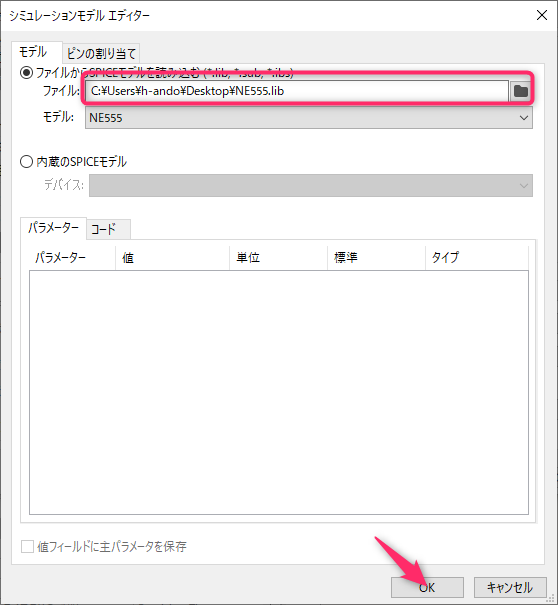
これで設定は完了です。
シミュレータの起動
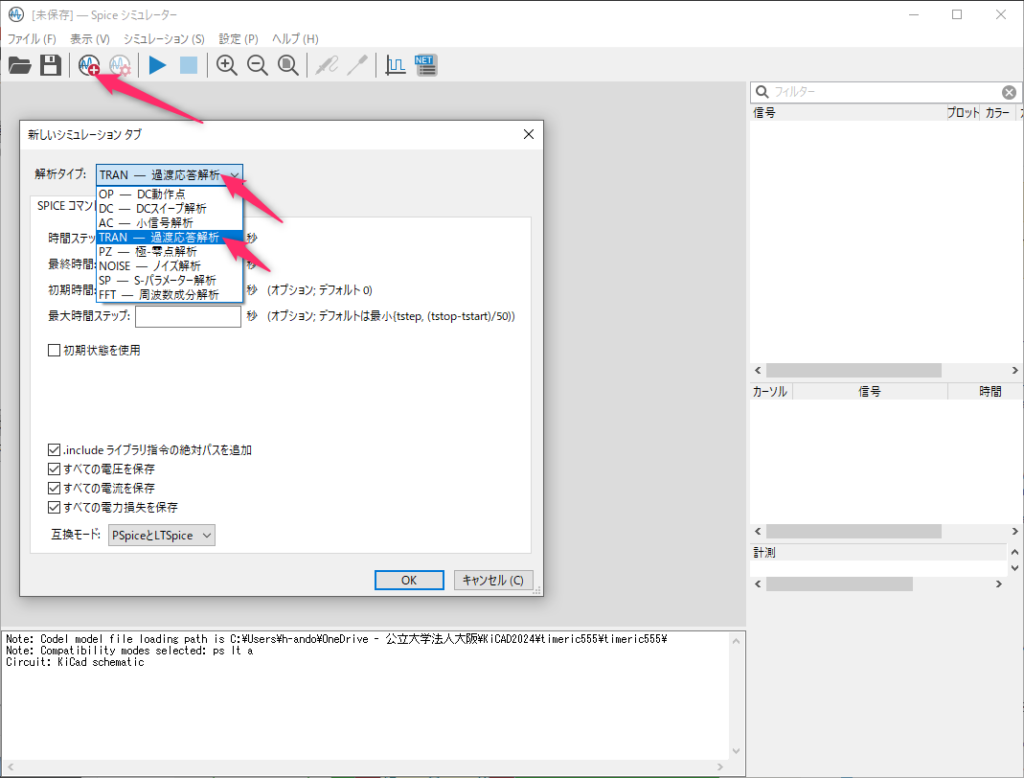
シミュレーターをクリックします。
新しい解析をクリックし、解析タイプを過渡応答特性にします。
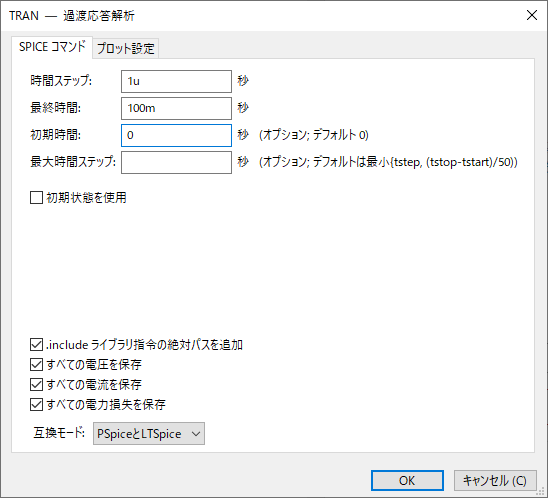
下記の通り設定します。
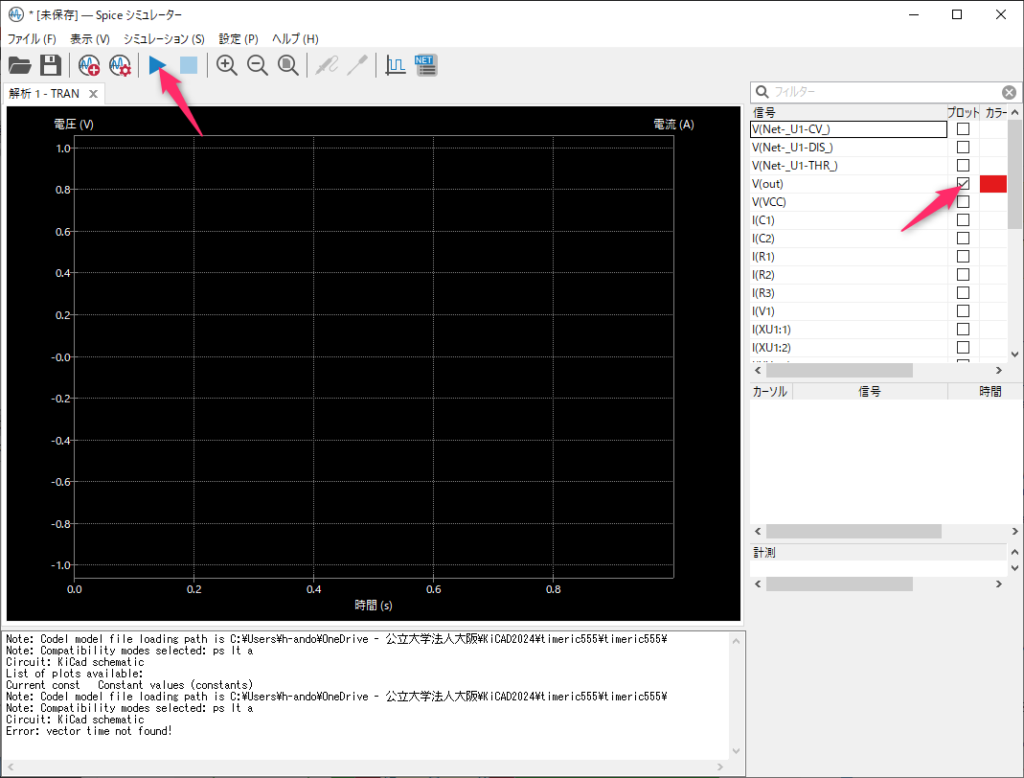
V(out)にチェックを入れ、シミュレーションを実行をクリックします。
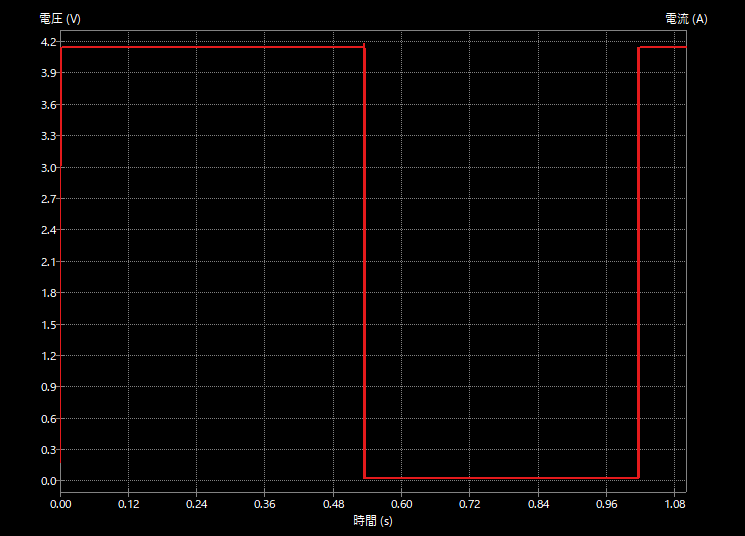
出力が表示されます。
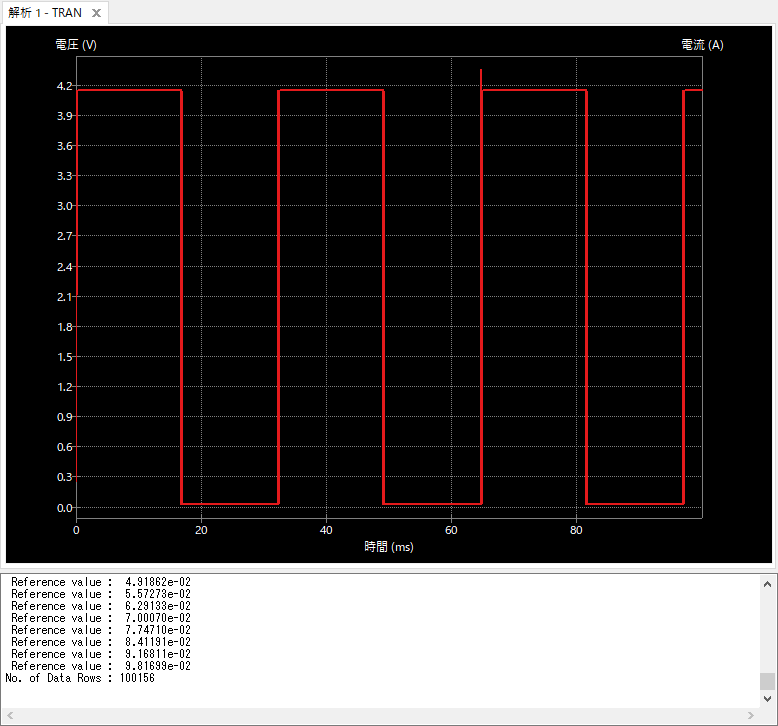
計算上、周波数は31Hz、デューティ比は52%になるはずです。概ね一致していることが分かると思います。
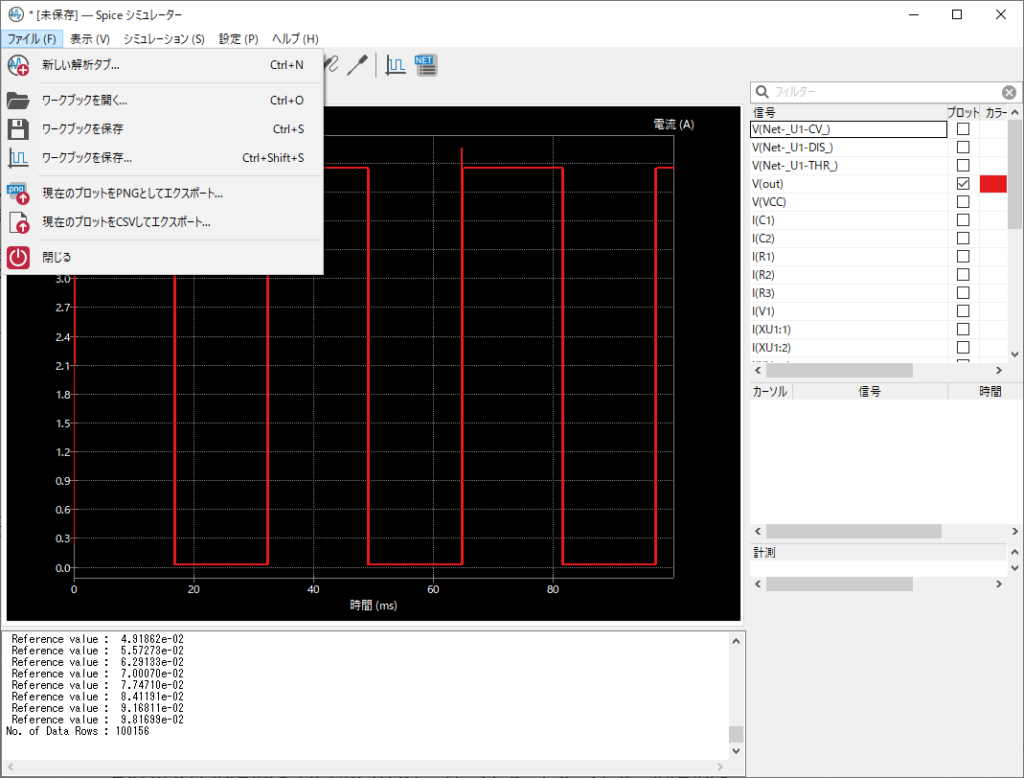
ファイル>現在のプロットを~としてエクスポート
を選ぶとグラフデータをPNGあるいはCSVで保存できます。
値の調整
解析をしながら回路素子の値を調整したい場合は多々あります。
このシミュレータ上でも抵抗値を変えながらすぐに結果がどうかるか観察することが出来ます。
するとシミュレータ上に調整枠が表示されます。
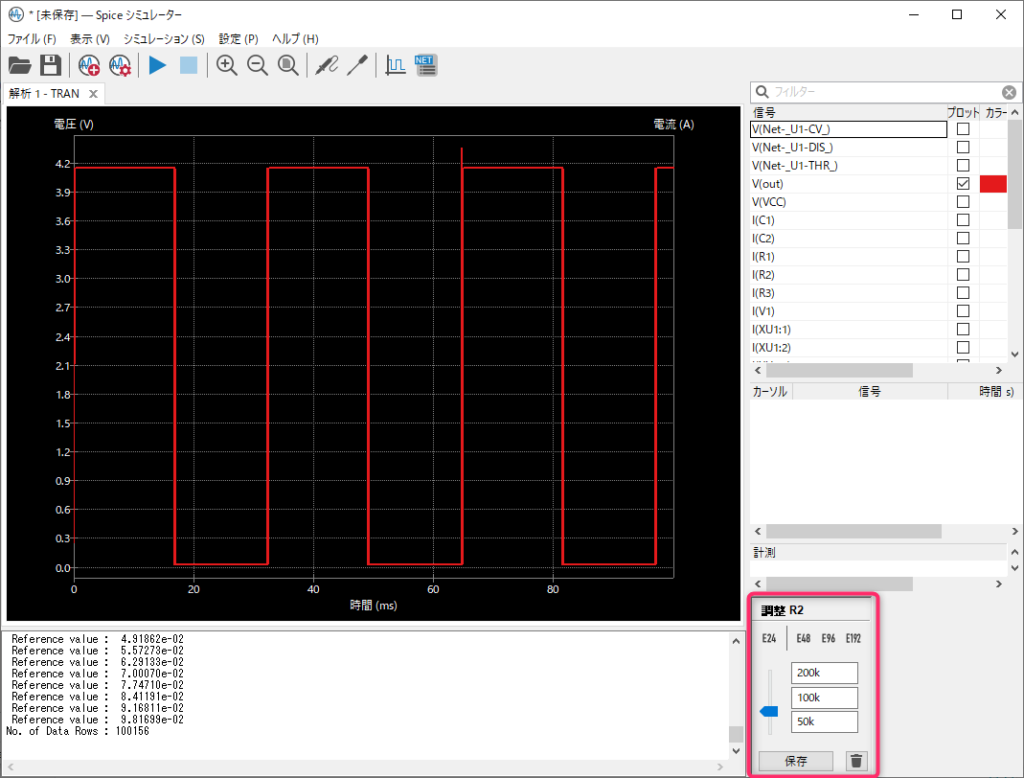
このスライダーを上下に動かすと瞬時にシミュレータが更新され周波数とデューティ比が変化している様子が観察できます。
課題
抵抗R1,R2およびコンデンサC1の値を調整し、1Hz,デューティー比50%の発信回路を作成し、NGSpiceで解析したグラフを提出せよ。
次回はこのタイマIC555を使ってサーボモータを制御することが出来る回路を作成してみます。
次回はこちら

Follow me!