
前回は回路図を作成しました。

今回は前回作成した回路図に対しフットプリントの割り当てを行います。

基板の固定穴の追加
基板には固定する穴をあけたいです。
この場合は回路図にも記載しておく必要が有ります。
MountingHoleで検索します。
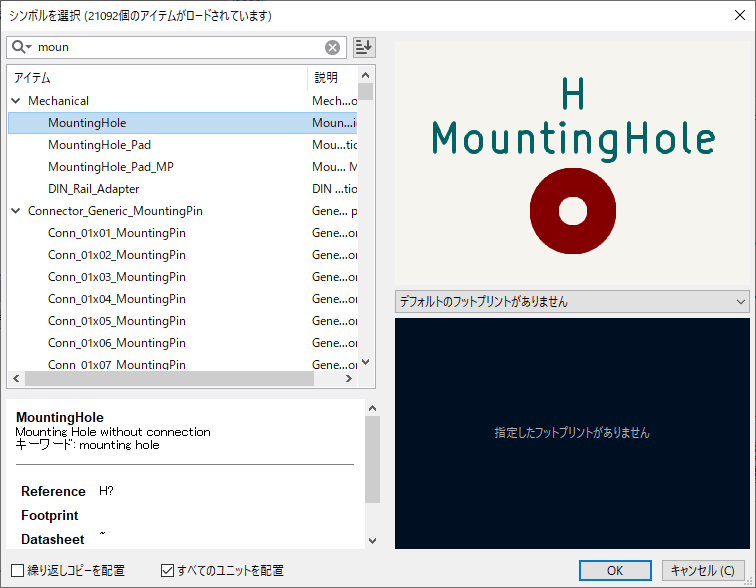
回路図のどこでも良いので配置しておきます。
フットプリントの割り当て
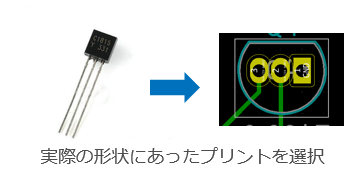
KiCADでは回路記号と実際の部品形状(フットプリント)は個別管理の為,対応付けの作業が必要となります。
同じ抵抗値でも大きいサイズの抵抗もあれば小さいサイズの抵抗もあるためです。

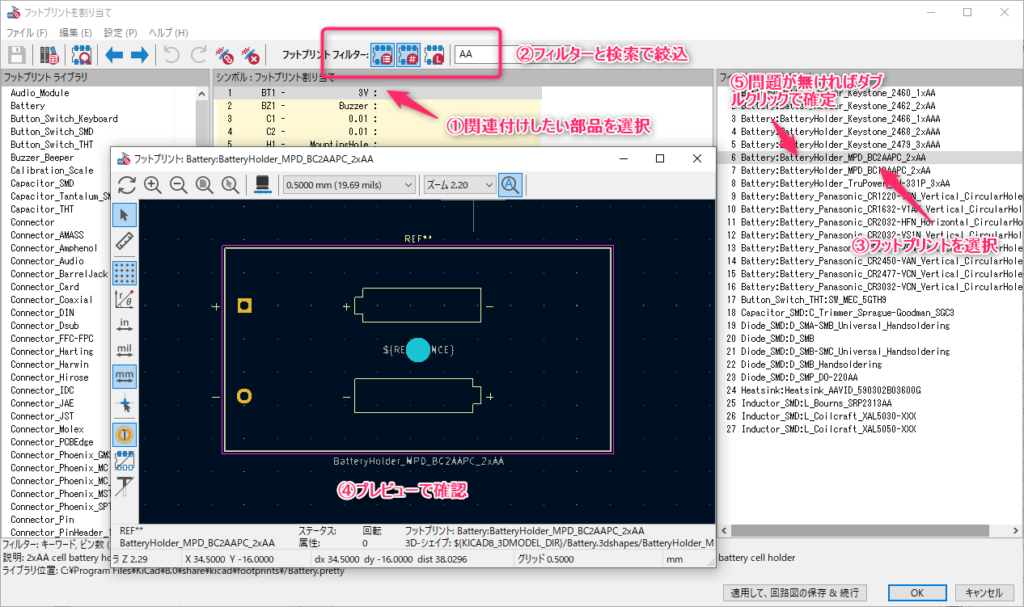
フットプリントを割り当てをクリックします。
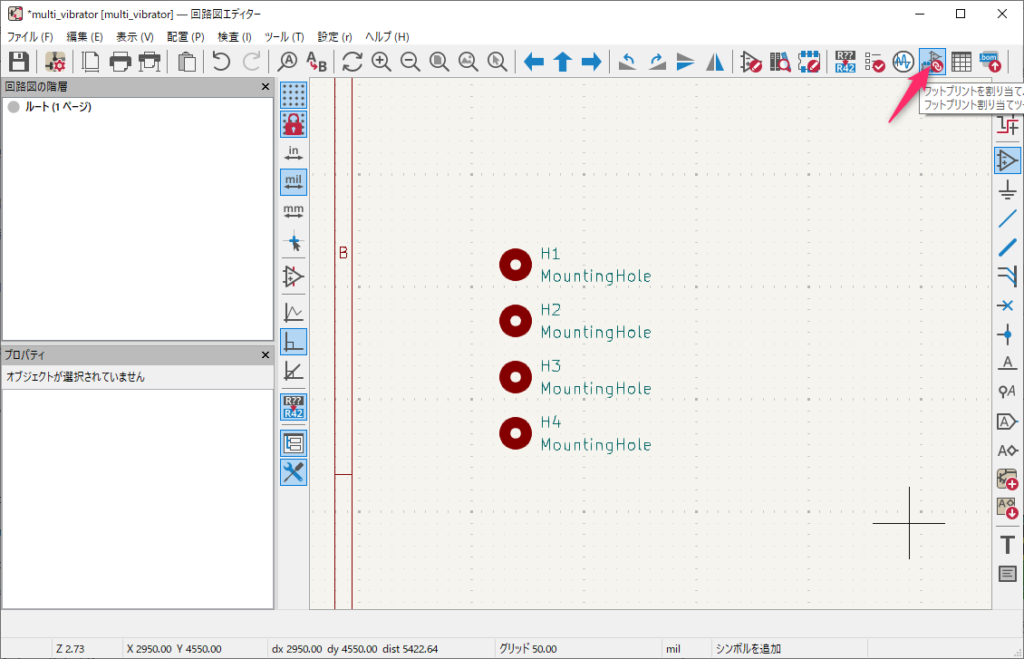
下記のようなウィンドウが出てきます。
中央の回路図で使用している部品それぞれに、左のリストにあるフットプリントを割り当ててゆきます。
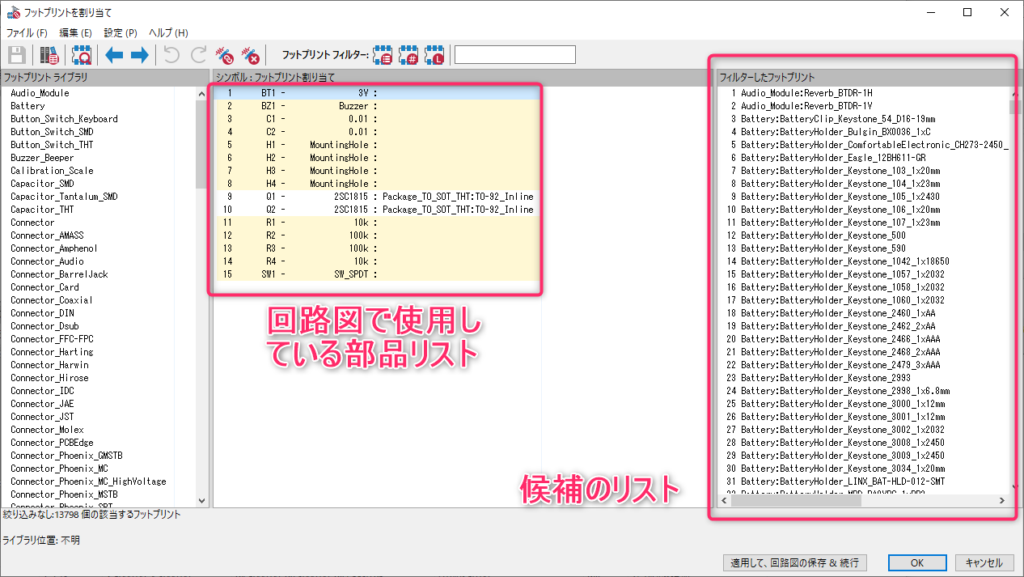
沢山表示されて絞り込めませんので、
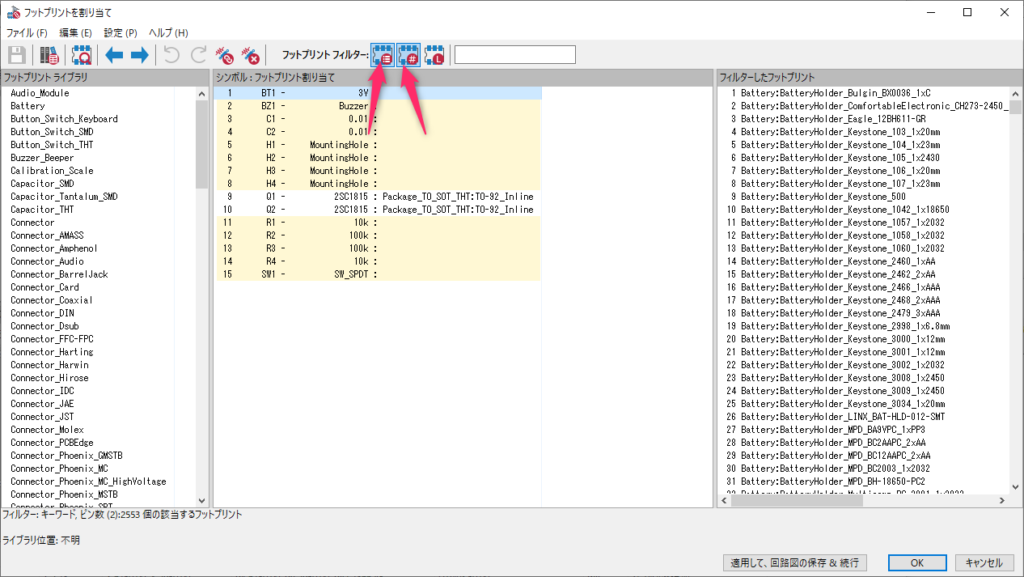
シンボルのフットプリントを使用 と ピン数でフィルターを選択します。
すると、回路図で使用したシンボルに関連したものかつ、足の本数が同じものに限定して表示されます。
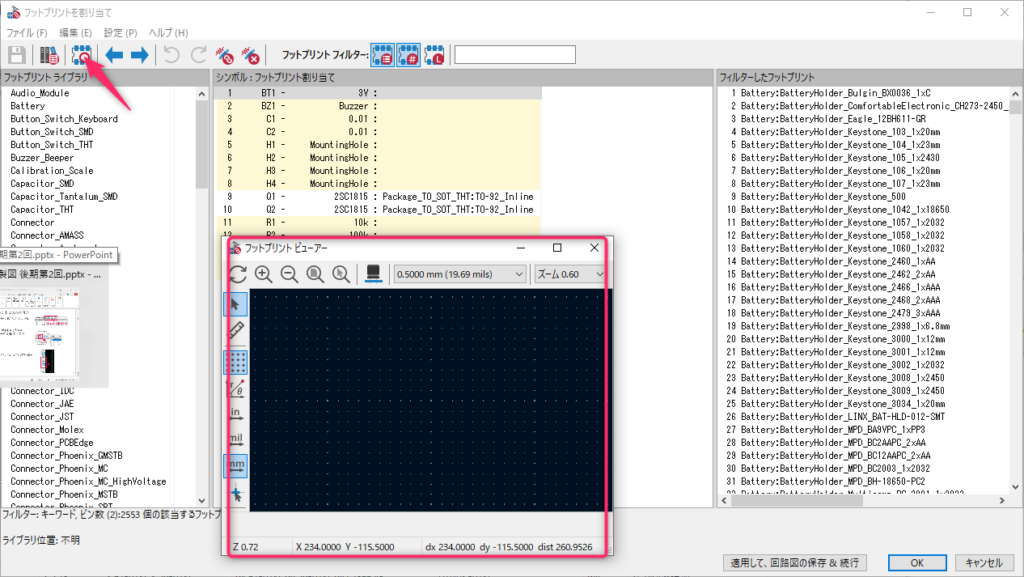
選択したフットプリントを表示をクリックすると、実際の形を確認しながら、選択することが出来ます。
1.バッテリーボックス
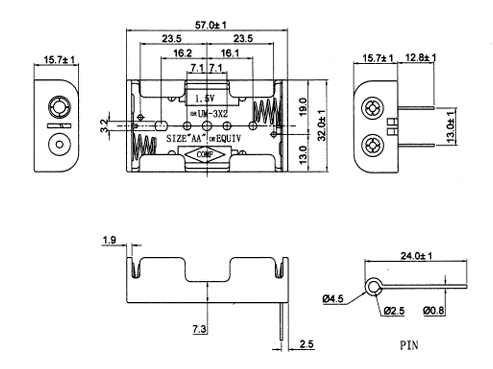
バッテリーは秋月の電池ボックスを使用します。

https://akizukidenshi.com/catalog/g/g103086/
寸法図も公開されていますので、こちらに合ったフットプリントを選択します。
検索でAAと入力し、部品の絞込をします。
順番に探してゆき、プレビューで確認しながら、形状が一致するフットプリントを探します。
正解を見つけた場合はリストからダブルクリックをすると、確定できます。
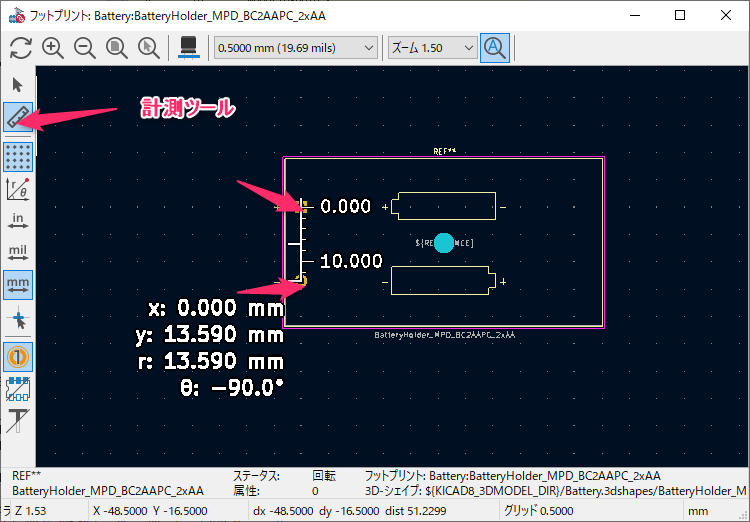
プレビューには計測ツールがありますので、ピンの間が13mm 前後になっていることを確認しておきます。
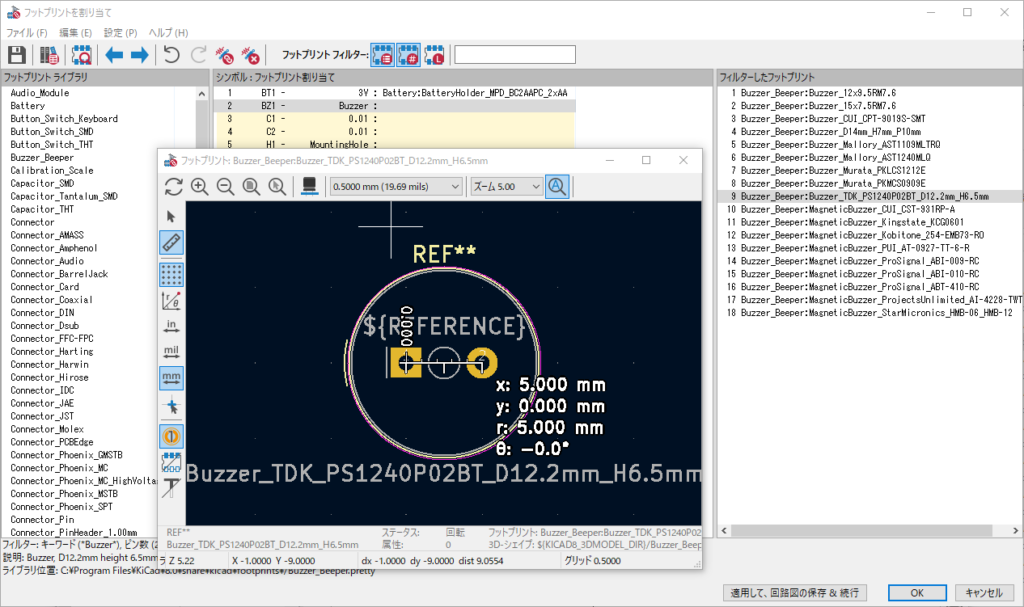
2.ブザー
ブザーは秋月で購入できるPKM13EPYH4000-A0にします。
https://akizukidenshi.com/catalog/g/g104118/

ピンの間が5mm、外周が13mmの物を探して選択します。
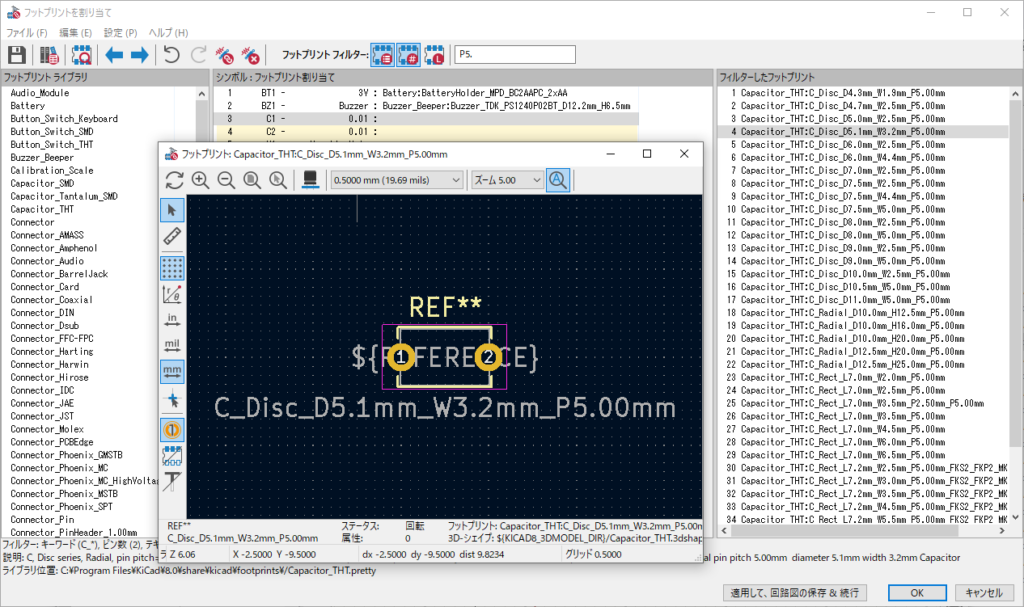
3.コンデンサ
コンデンサはセラミックコンデンサを使用します。
大きく分けてTHTタイプとSMDタイプがあります。
THTタイプはリード線が付いている部品でサイズが大きくはんだ付けが容易です。
SMDはチップタイプで小さい為、回路の小型化には大きく貢献しますが、はんだ付けの難易度は高いです。
今回は最も一般的なタイプのコンデンサを使用します。
https://akizukidenshi.com/catalog/g/g116533/

端子の間の距離を表すピッチが5mmなので、検索窓にはP5.と入れて絞り込みます。
厚みを表すW3.2の物を選びます。
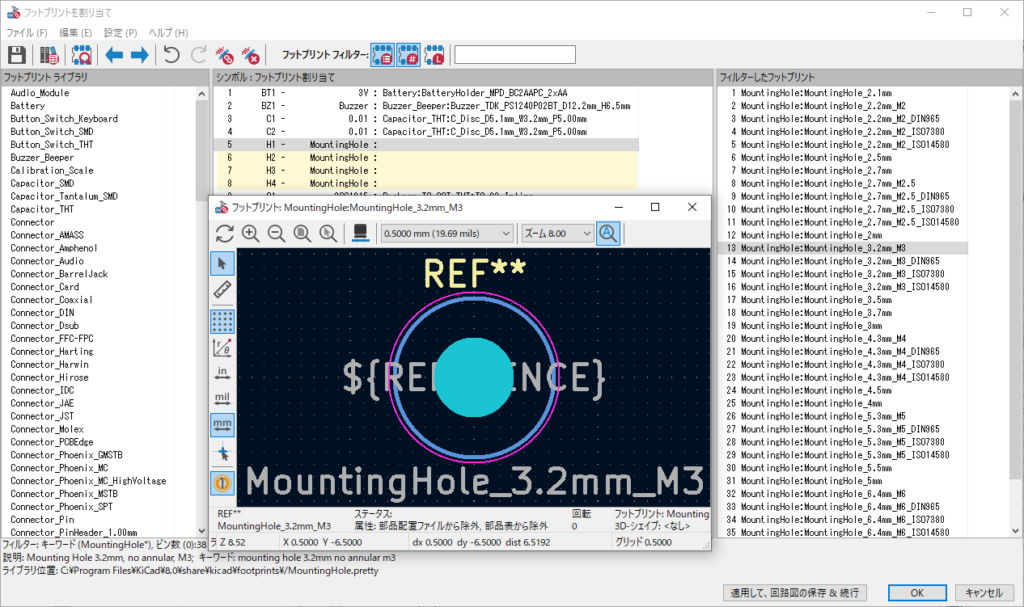
4.穴
MountingHoleはM3の3.2mmの穴が空いているものを選択します。
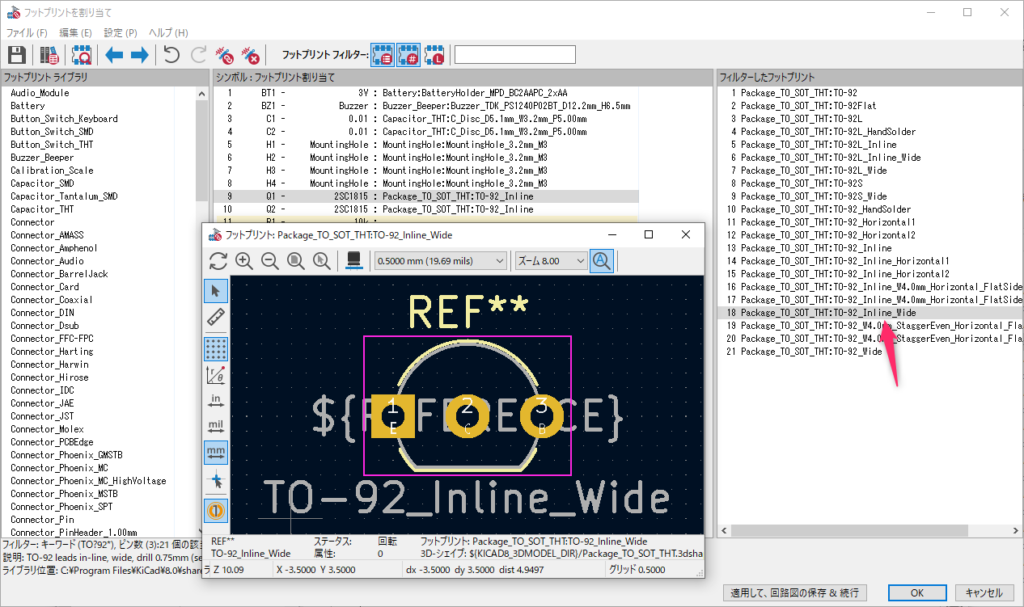
5.トランジスタ
秋月で購入できる2SC1815L-Y-T92-Kを想定します。

https://akizukidenshi.com/catalog/g/g106475/
トランジスタはデフォルトでフットプリントが選択されていますが少し足の間が狭いので、選びなおします。
同じサイズでInline_Wideの物がありますのでダブルクリックで選択します。
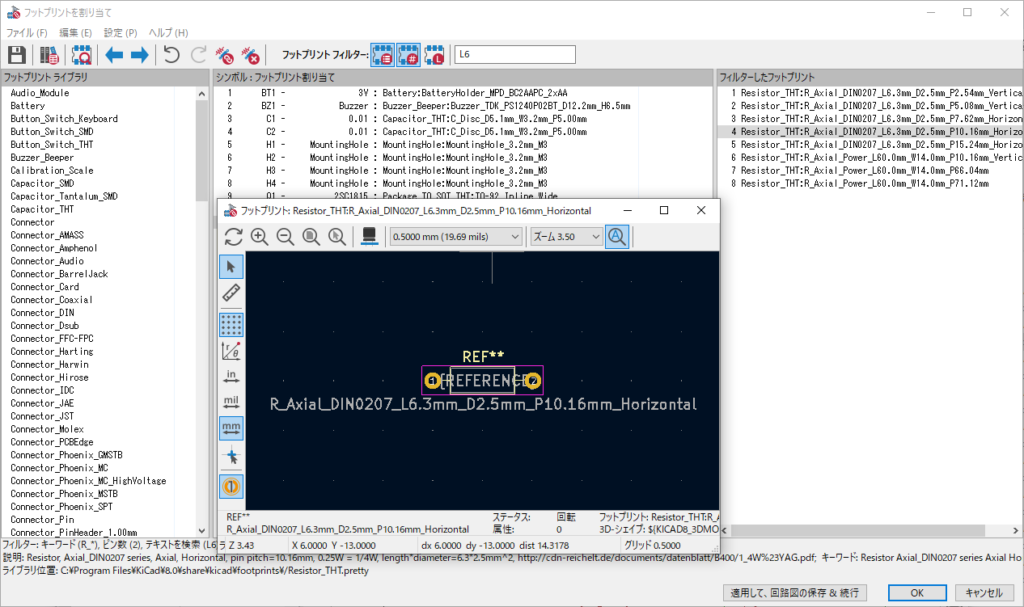
6.抵抗器
一般的な炭素被膜抵抗を使用します。

https://akizukidenshi.com/catalog/g/g125103/
長さが6mm程度なのでL6で検索窓に入力し、絞り込みます。ピッチ10.16の物を選択します。
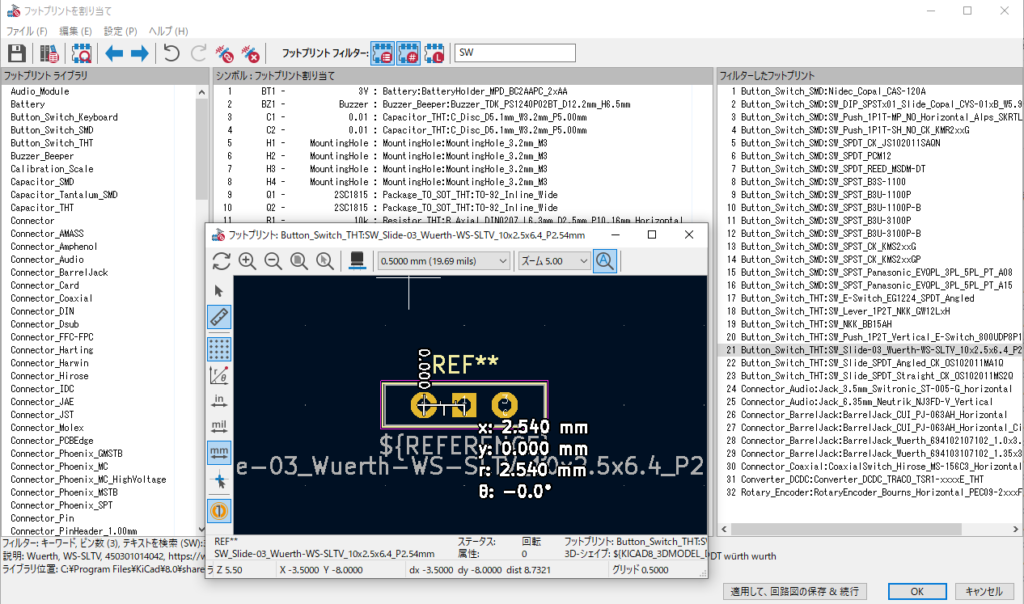
7.スイッチ
秋月で購入できる小さいスライドスイッチにします。
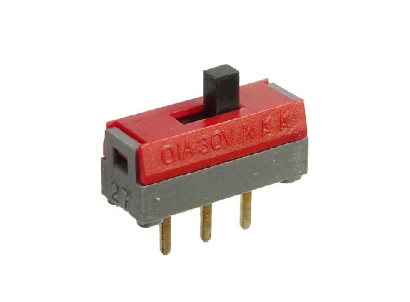
https://akizukidenshi.com/catalog/g/g115643/
図面を見ると、端子間のピッチが2.54mmとなっています。
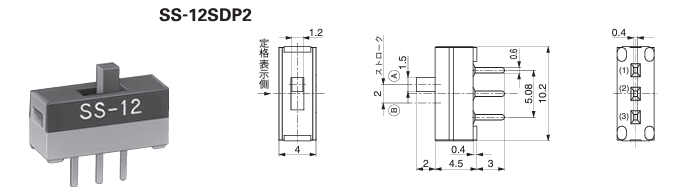
SWで絞込み、対応する物を探します。
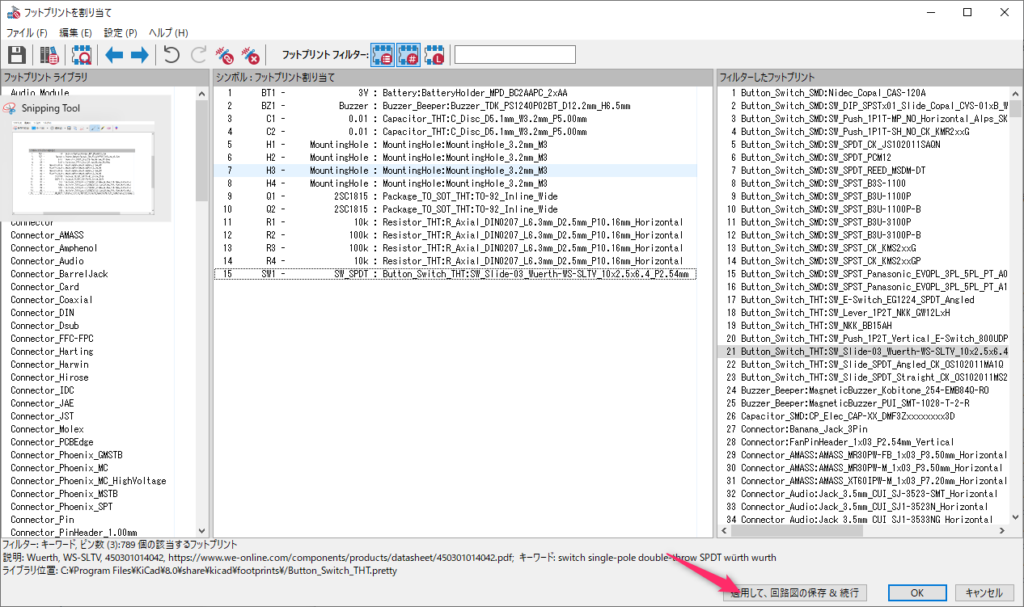
確認
下記の図の通り、割り当てられている事を確認してください。
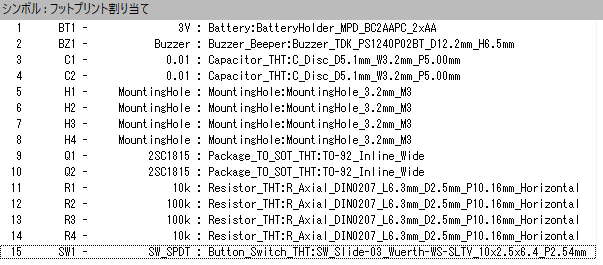
適応して、回路図の保存&続行をクリックします。
OKを押すと、ウィンドウが閉じて回路図エディタに戻ります。
これでフットプリントの割り当ては完了です。
次回はいよいよPCB基板の設計に移ってゆきます。
次回はこちら

Follow me!